Samples
Overview
In the samples, the document provides you with a list of the completely built modules in many nominated industries to support you build on your module. If you still don’t know where to start, these samples would be useful for you to have an initial view of the project and be able to easily adjust it. Create your own module using the sample. Find out more information below.
Github : https://github.com/dr-dart
Samples
Project Name | Usage | |
|---|---|---|
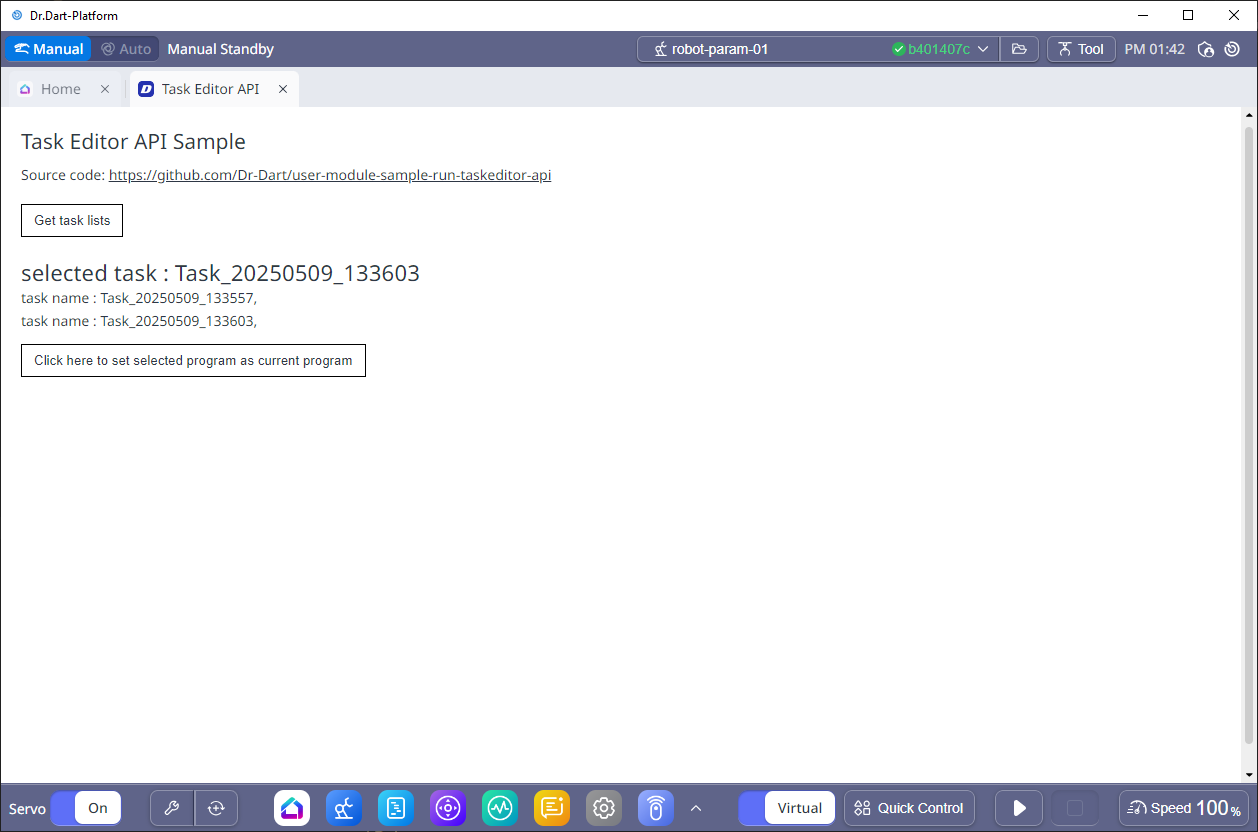
| 1 | user-module-sample-run-taskeditor-api Keyword: | This is a sample module that have following features:
This module provides the following features:
 |
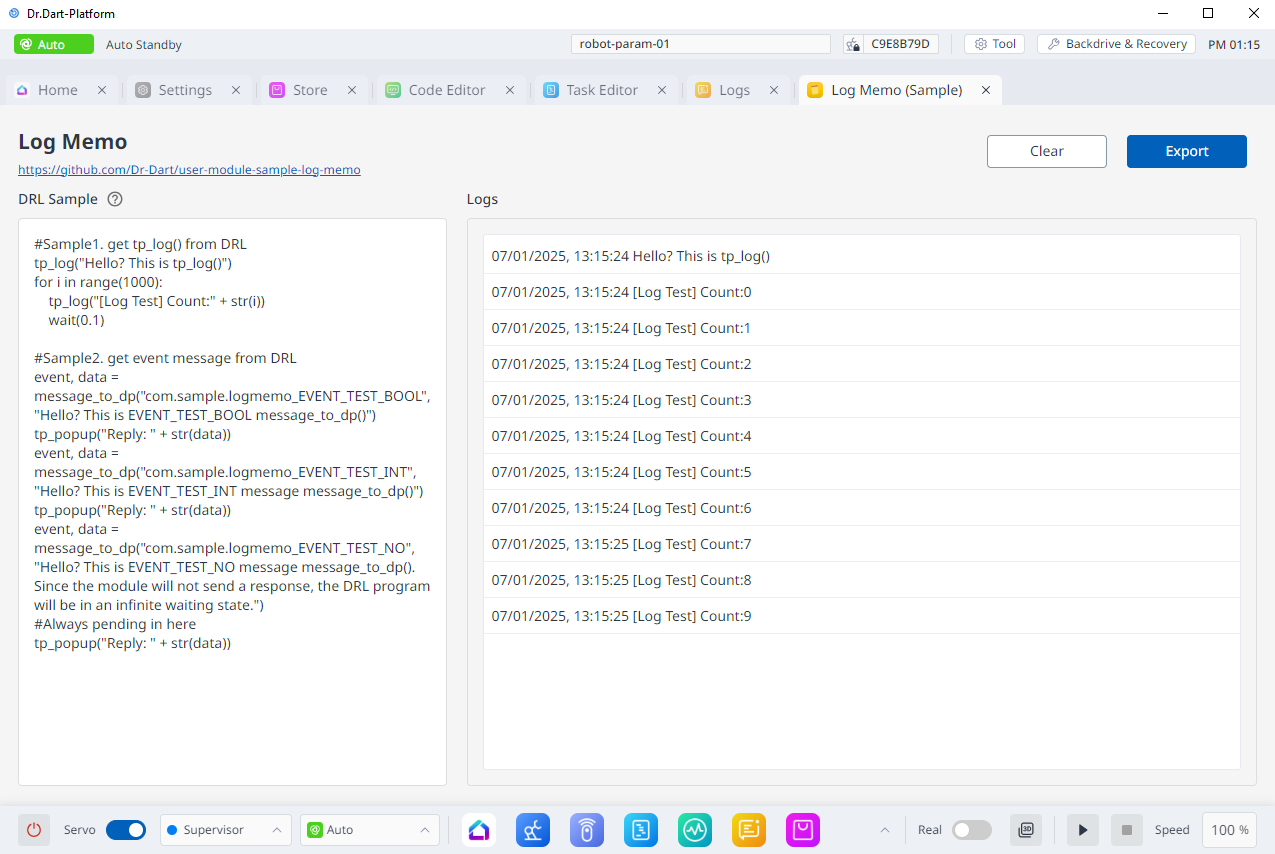
| 2 | Keyword: | This module is a sample module that provides log message and event message processing and storage functionality through DRL's This module provides the following features:
 |
| 3 | user-module-sample-user-command Keyword: | This sample contains the most up-to-date user command functionality. The module's main screen (module screen) has two pages, and the values set on each page are saved in the DB.
The module's PIP screen (user command screen) provides a page for setting |
| 4 | user-module-sample-dio-gripper Keyword: | This sample is a modified Digital I/O module provided from the Device Module UI templates in Dr.Dart-IDE. In this Module, you can
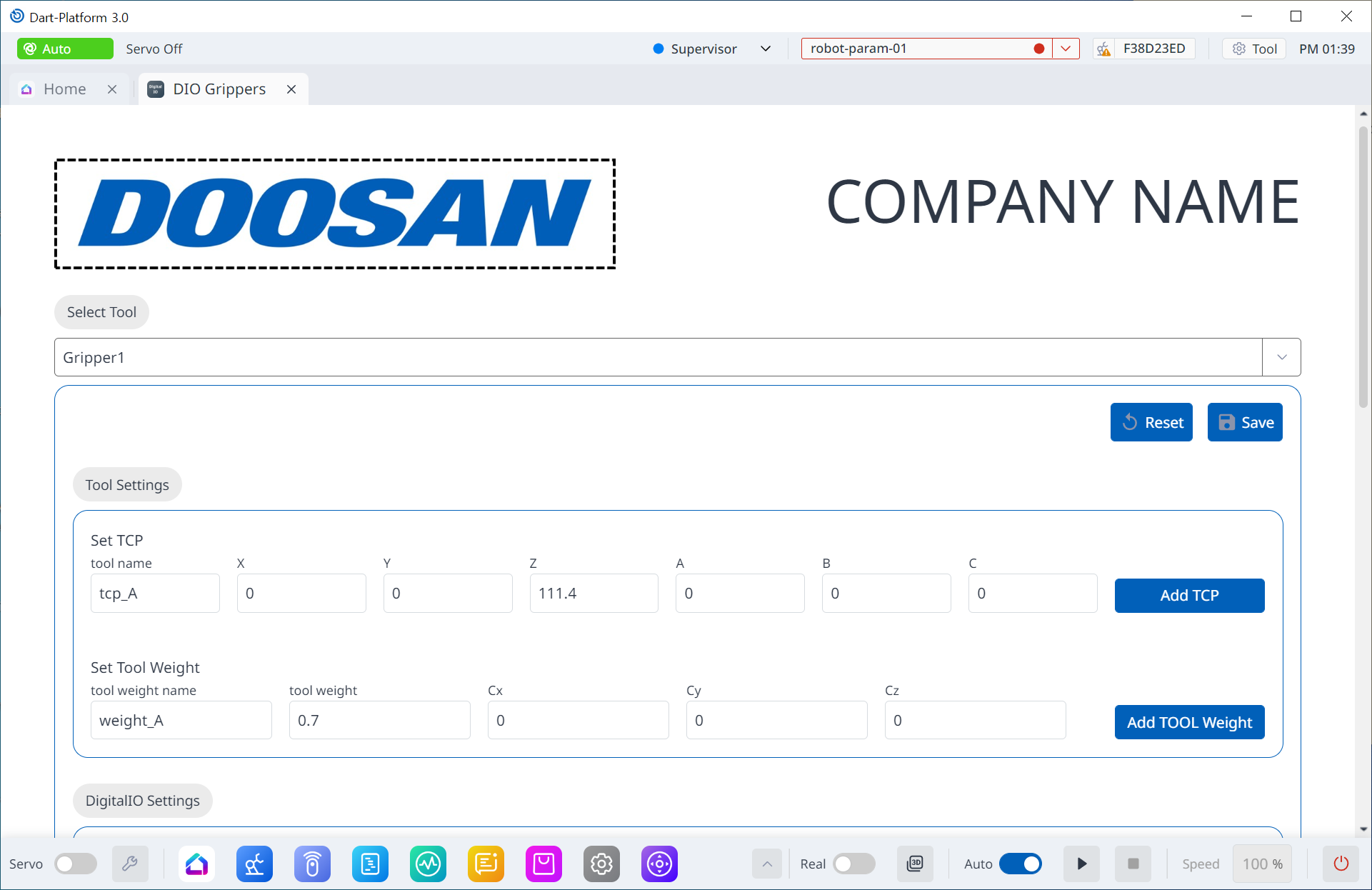 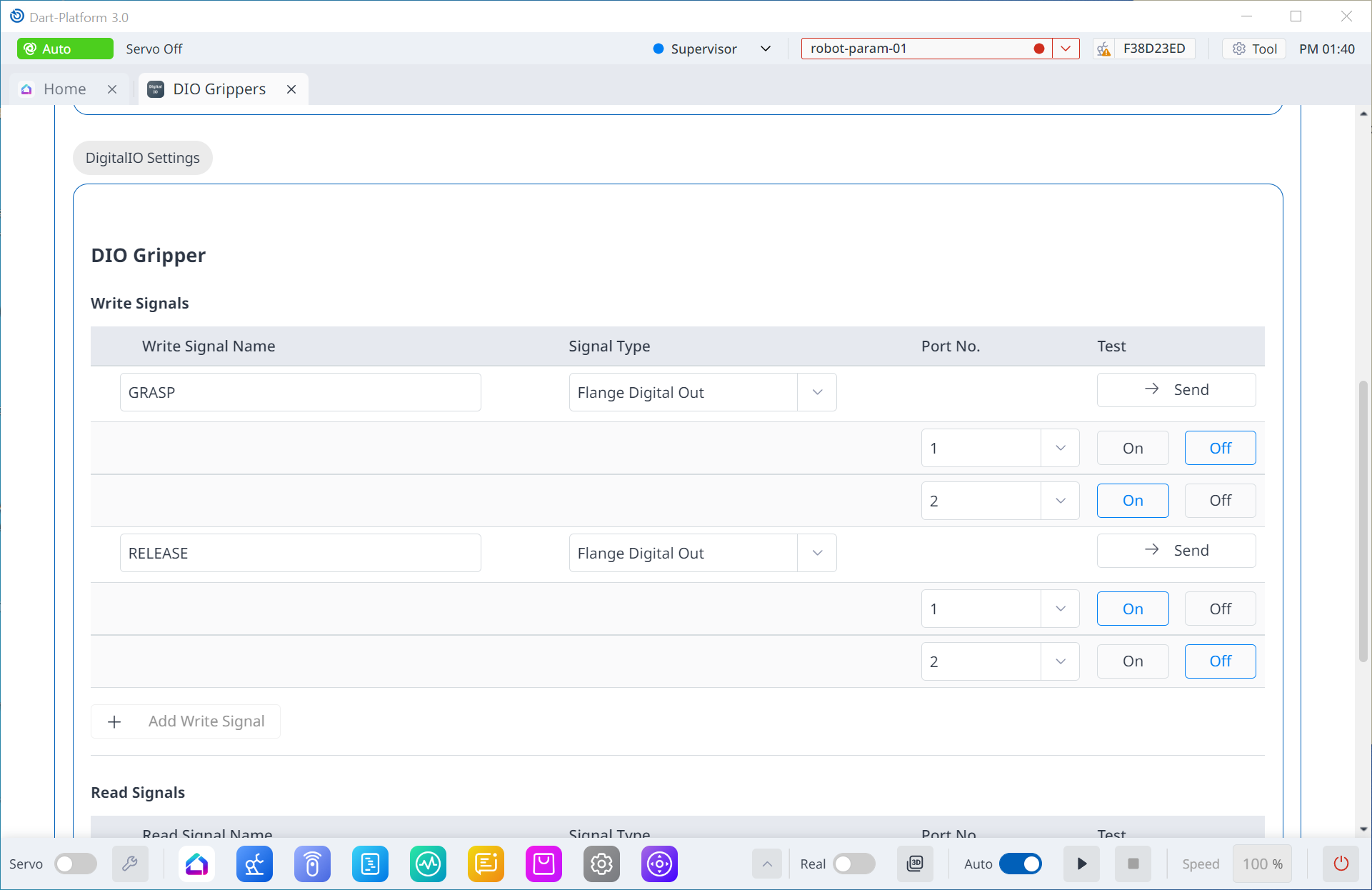 In Task Editor Module(former Task Builder/Task Writer),

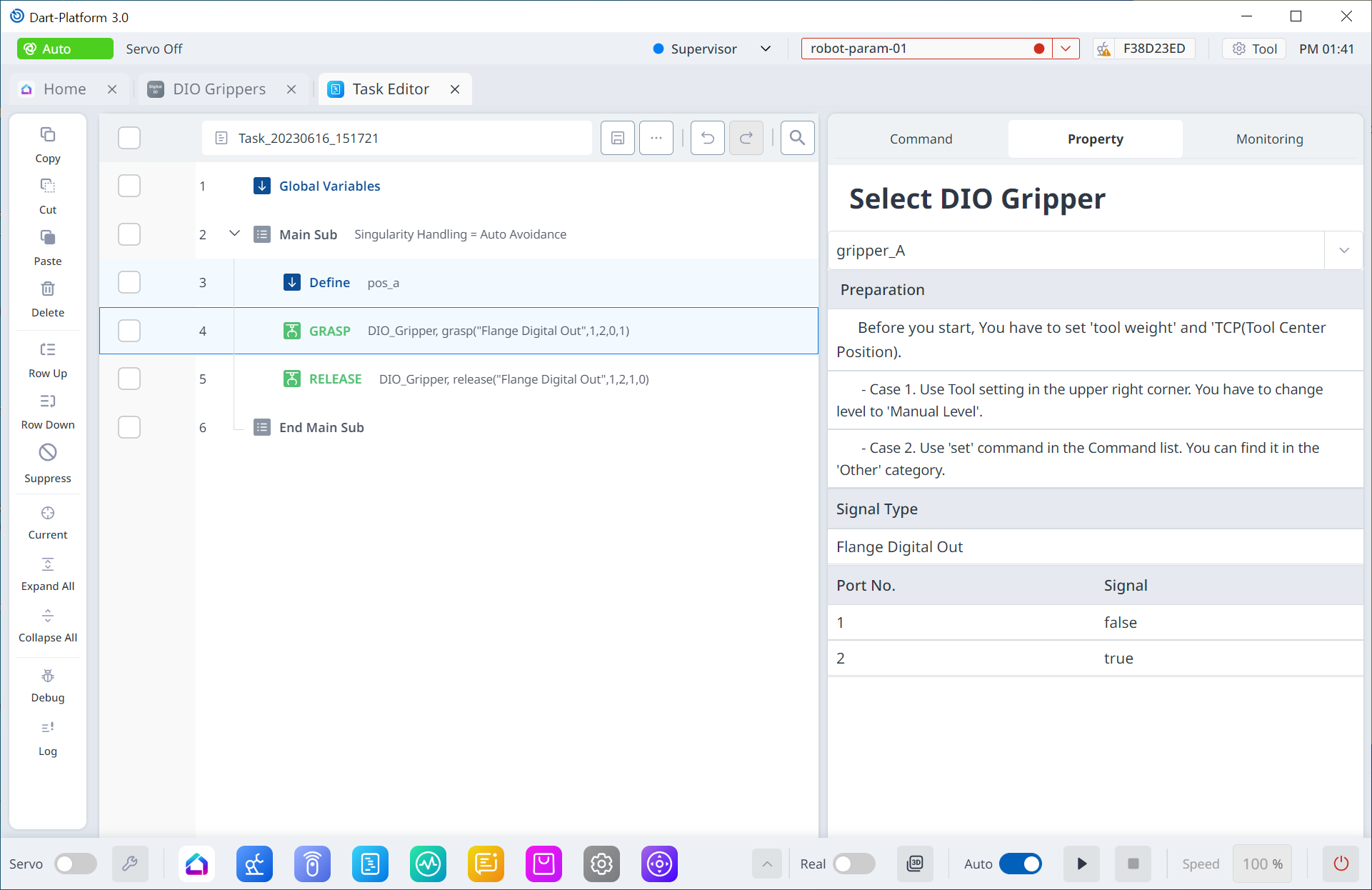
|
| 5 | Keyword: | This sample is a dart package module sample for those who want to use the framework module. In this Module, you can
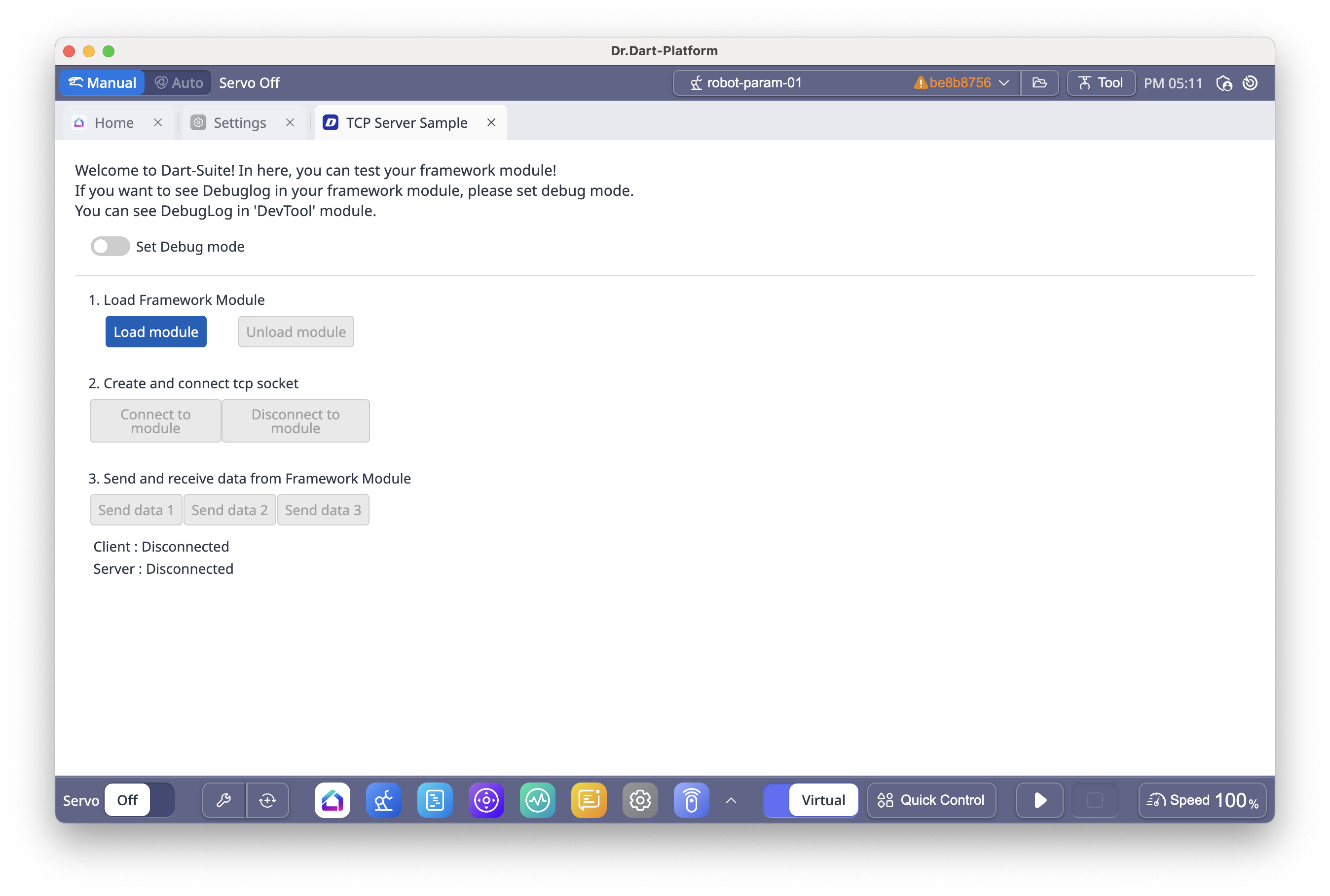 |