Call Sub Command
Overview
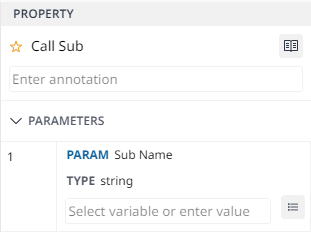
The Call Sub Command is the command used to help the robot to call functions.
Property
Annotation
You can insert text in the description, unique meaning, or nickname for each Parameter to differentiate from many DRL Components.

Example
DRL Code
PY
# Example
def fn_Times(a, b):
return a * b
fn_Times (10, 10)
def fn_Times(a, b):
return a * b
tp_log(str(fn_Times(10, 5)))
#expected result: 50
def movej():
return 0 # movej should not be used as a function name as interpreter
# internal function name