Move B Command
Overview
Move B Command is the motion command that can help the robot to move along the straight and circular path connected to multiple waypoints and destinations within the workspace.
This function takes a list that has one or more path segments (straight or circular) as arguments and moves at a constant velocity by blending each segment into the specified radius. Here, the radius can be set through posb.
Property
Annotation
You can insert text in the description, unique meaning, or nickname for each Parameter to differentiate with many DRL Components.

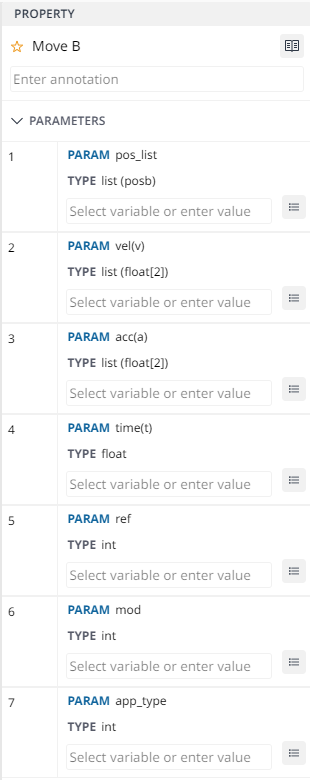
Parameters
In Parameter Panel, it will help you create or select your variable to define the parameter of the chosen command.
For detailed DRL description other than parameter, please refer to the following online manual link: https://manual.doosanrobotics.com/help/programming/2.9/publish/en_us/moveb-13682544.html.
Parameter Name | Data Type | Default Value | Description |
pos_list | list (posb) | - | posb list |
size (v) | float | None | velocity or velocity1, velocity2 |
list (float[2]) | |||
acc (a) | float | None | acceleration or acceleration1, acceleration2 |
list (float[2]) | |||
time (t) | float | None | Reach time [sec]
|
ref | int | None | reference coordinate
|
courage | int | DR_MV_MOD_ABS | Movement criteria
|
app_type | int | DR_MV_APP_NONE | Application Integration Options
|
Example
DRL Code
# Init Pose @ Jx1
Jx1 = posj(45,0,90,0,90,45) # initial joint position
X0 = posx(370, 420, 650, 0, 180, 0) # initial task position
# CASE 1) ABSOLUTE
# Absolute Goal Poses
X1 = posx(370, 670, 650, 0, 180, 0)
X1a = posx(370, 670, 400, 0, 180, 0)
X1a2= posx(370, 545, 400, 0, 180, 0)
X1b = posx(370, 595, 400, 0, 180, 0)
X1b2= posx(370, 670, 400, 0, 180, 0)
X1c = posx(370, 420, 150, 0, 180, 0)
X1c2= posx(370, 545, 150, 0, 180, 0)
X1d = posx(370, 670, 275, 0, 180, 0)
X1d2= posx(370, 795, 150, 0, 180, 0)
seg11 = posb(DR_LINE, X1, radius=20)
seg12 = posb(DR_CIRCLE, X1a, X1a2, radius=20)
seg14 = posb(DR_LINE, X1b2, radius=20)
seg15 = posb(DR_CIRCLE, X1c, X1c2, radius=20)
seg16 = posb(DR_CIRCLE, X1d, X1d2, radius=20)
b_list1 = [seg11, seg12, seg14, seg15, seg16]
# The blending radius of the last waypoint (seg16) is ignored.
movej(Jx1, vel=30, acc=60, mod=DR_MV_MOD_ABS)
# Joint motion to the initial angle (Jx1)
movel(X0, vel=150, acc=250, ref=DR_BASE, mod=DR_MV_MOD_ABS)
# Line motion to the initial position (X0)
moveb(b_list1, vel=150, acc=250, ref=DR_BASE, mod=DR_MV_MOD_ABS)
# Moves the robot from the current position through a trajectory consisting of seg11(LINE), seg12(CIRCLE), seg14(LINE),
# seg15(CIRCLE), and seg16(CIRCLE) with a constant velocity of 150(mm/sec) with the exception of accelerating and decelerating sections.
# (The final point is X1d2.) Blending to the next segment begins
# when the distance of 20mm from the end point (X1, X1a2, X1b2, X1c2, and X1d2) of each segment
# is reached.
# CASE 2) RELATIVE
# Relative Goal Poses
dX1 = posx(0, 250, 0, 0, 0, 0)
dX1a = posx(0, 0, -150, 0, 0, 0)
dX1a2= posx(0, -125, 0, 0, 0, 0)
dX1b = posx(0, 50, 0, 0, 0, 0)
dX1b2= posx(0, 75, 0, 0, 0, 0)
dX1c = posx(0, -250, -250, 0, 0, 0)
dX1c2= posx(0, 125, 0, 0, 0, 0)
dX1d = posx(0, 125, 125, 0, 0, 0)
dX1d2= posx(0, 125, -125, 0, 0, 0)
dseg11 = posb(DR_LINE, dX1, radius=20)
dseg12 = posb(DR_CIRCLE, dX1a, dX1a2, radius=20)
dseg14 = posb(DR_LINE, dX1b2, radius=20)
dseg15 = posb(DR_CIRCLE, dX1c, dX1c2, radius=20)
dseg16 = posb(DR_CIRCLE, dX1d, dX1d2, radius=20)
db_list1 = [dseg11, dseg12, dseg14, dseg15, dseg16]
# The blending radius of the last waypoint (dseg16) is ignored.
movej(Jx1, vel=30, acc=60, mod=DR_MV_MOD_ABS)
# Joint motion to the initial angle (Jx1)
movel(X0, vel=150, acc=250, ref=DR_BASE, mod=DR_MV_MOD_ABS)
# Line motion to the initial position (X0)
moveb(b_list1, vel=150, acc=250, ref=DR_BASE, mod=DR_MV_MOD_ABS)
# Moves the robot from the current position through a trajectory consisting of dseg11(LINE), dseg12(CIRCLE), dseg14(LINE),
# dseg15(CIRCLE), and dseg16(CIRCLE) with a constant velocity of 150(mm/sec) with the exception of accelerating and decelerating sections. (The final point is X1d2.)
# Blending to the next segment begins when the distance of 20mm from the end point (X1, X1a2, X1b2, X1c2, and X1d2) of each segment is reached. (The path is the same as CASE#1.)