Move L Command
Overview
Move L Command is the motion command that can help the robot to move along a straight line to the target position (pos) within the task space.
Property
Annotation
You can insert text in the description, unique meaning, or nickname for each Parameter to differentiate with many DRL Components.

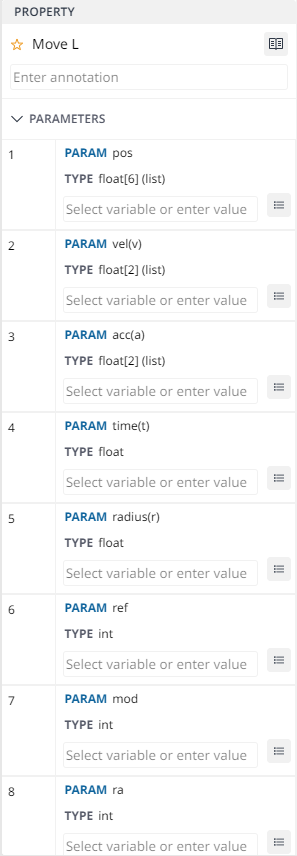
Parameters
In Parameter Panel, it will help you create or select your variable to define the parameter of the chosen command.
For detailed DRL description other than parameter, please refer to the following online manual link: https://manual.doosanrobotics.com/help/programming/2.9/publish/en_us/movel-13682514.html.
Parameter Name | Data Type | Default Value | Description |
pos | posx | - | posx or position list |
list (float[6]) | |||
size (v) | float | None | velocity or velocity1, velocity2 |
list (float[2]) | None | ||
acc (a) | float | None | acceleration or acceleration1, acceleration2 |
list (float[2]) | None | ||
time (t) | float | None | Reach time [sec]
|
radius (r) | float | None | blending시 radius |
ref | int | None | reference coordinate
|
courage | int | DR_MV_MOD_ABS | Movement criteria
|
go out | int | DR_MV_RA_DUPLICATE | Reactive motion mode
|
app_type | int | DR_MV_APP_NONE | Application Integration Options
|
Example
DRL Code
P0 = posj(0,0,90,0,90,0)
movej(P0, v=30, a=30)
P1 = posx(400,500,800,0,180,0)
P2 = posx(400,500,500,0,180,0)
P3 = posx(30,30,30,0,0,0)
movel(P1, vel=30, acc=100)
# Moves to the P1 position with a velocity of 30(mm/sec) and acceleration of 100(mm/sec2).
movel(P2, time=5)
# Moves to the P2 position with a reach time of 5 sec.
movel(P3, time=5, ref=DR_TOOL, mod=DR_MV_MOD_REL)
# Moves the robot from the start position to the relative position of P3 in the tool coordinate system
# with a reach time of 5 sec.
movel(P2, time=5, r=10)
# Moves the robot to the P2 position with a reach time of 5 seconds,
# and the next motion is executed when the distance from the P2 position is 10mm.