Move Periodic Command
Overview
Move Periodic Command is the motion command that can help the robot to move the robot along a path repeated periodically.
This function performs the cyclic motion based on the sine function of each axis (parallel and rotation) of the reference coordinate (ref) input as a relative motion that begins at the current position.
The attributes of the motion on each axis are determined by the amplitude and period. Besides, the acceleration/deceleration time and the total motion time are set by the interval and repetition count.
Property
Annotation
You can insert text in the description, unique meaning, or nickname for each Parameter to differentiate with many DRL Components.

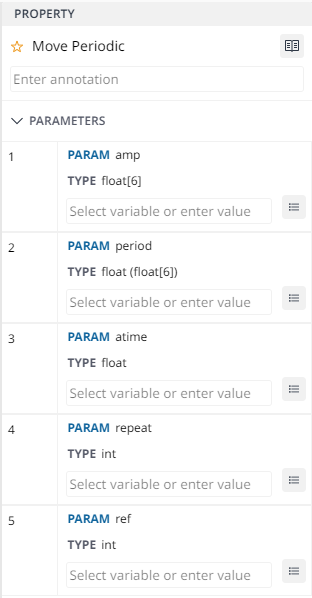
Parameters
In Parameter Panel, it will help you create or select your variable to define the parameter of the chosen command.
For detailed DRL description other than parameter, please refer to the following online manual link: https://manual.doosanrobotics.com/help/programming/2.9/publish/en_us/move_periodic-13682554.html.
Parameter Name | Data Type | Default Value | Scope | Description |
amp | list (float[6]) | - | 0≤amp | Amplitude (Motion between -amp and +amp) [mm] or [deg] |
period | float or list (float[6]) | 0≤period | period (time required for 1 cycle)[sec] | |
atime | float | 0.0 | 0≤atime | Acc-, dec- time [sec] |
repeat | int | 1 | > 0 | repetition count |
ref | int | DR_TOOL | - | reference coordinate
|
Example
DRL Code
P0 = posj(0,0,90,0,90,0)
movej(P0)
#1
move_periodic(amp =[10,0,0,0,30,0], period=1.0, atime=0.2, repeat=5, ref=DR_TOOL)
# Repeats the x-axis (10mm amp and 1 sec. period) motion and rotating y-axis (30deg amp and 1 sec. period) motion in the tool coordinate system
# totally, repeat the motion 5 times.
#2
move_periodic(amp =[10,0,20,0,0.5,0], period=[1,0,1.5,0,0,0], atime=0.5, repeat=3, ref=DR_BASE)
# Repeats the x-axis (10mm amp and 1 sec. period) motion and z-axis (20mm amp and 1.5 sec. period) motion in the base coordinate system
# 3 times. The rotating y-axis motion is not performed since its period is "0".
# The total motion time is about 5.5 sec. (1.5 sec. * 3 times + 1 sec. for acceleration/deceleration) since the period of the x-axis motion is greater.
# The x-axis motion is repeated 4.5 times.