SimulatorJog
Overview
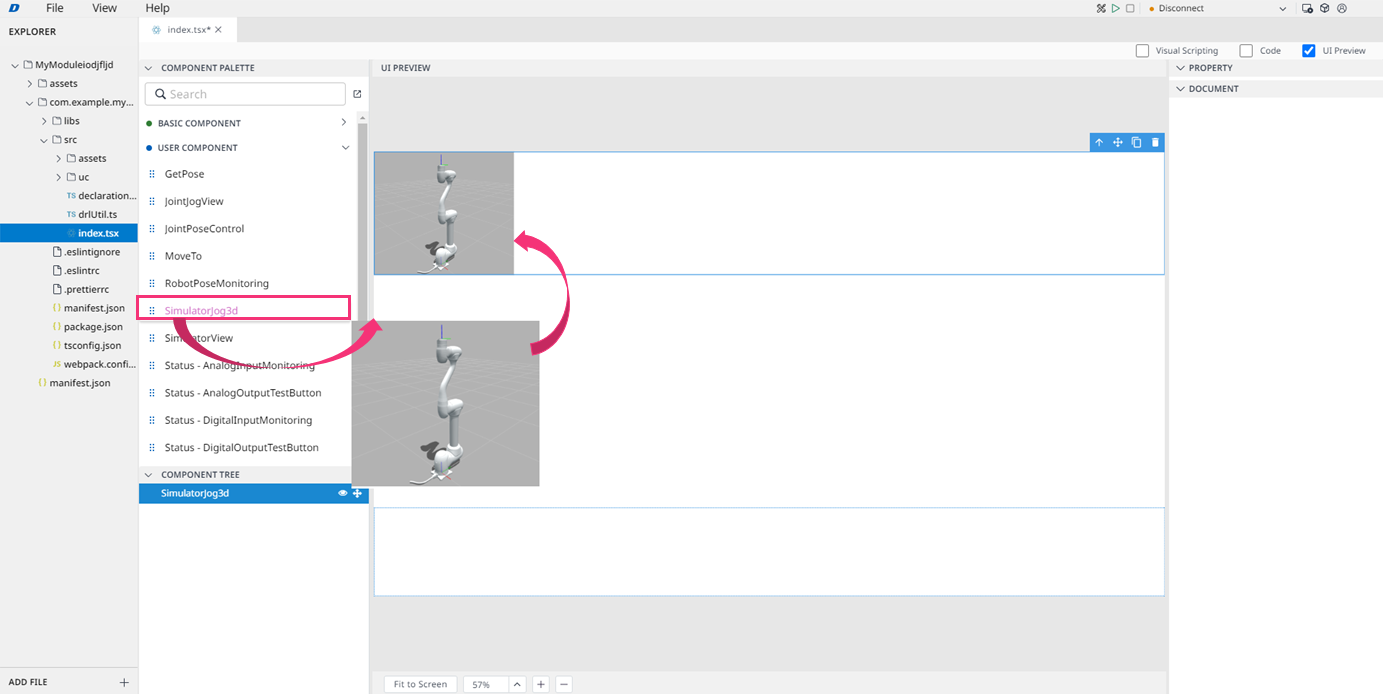
SimulatorJog3D is one of the User Components that combines both JointJogView and SimulatorView Components.
With this component, you can simply teach robot only with the 3D Viewer. This means, you can move the robot joint or end of the robot to the direction you want only by touching the screen.
There are two types of this component, Joint Jog and Task Jog type. In each type, different functions are provided.
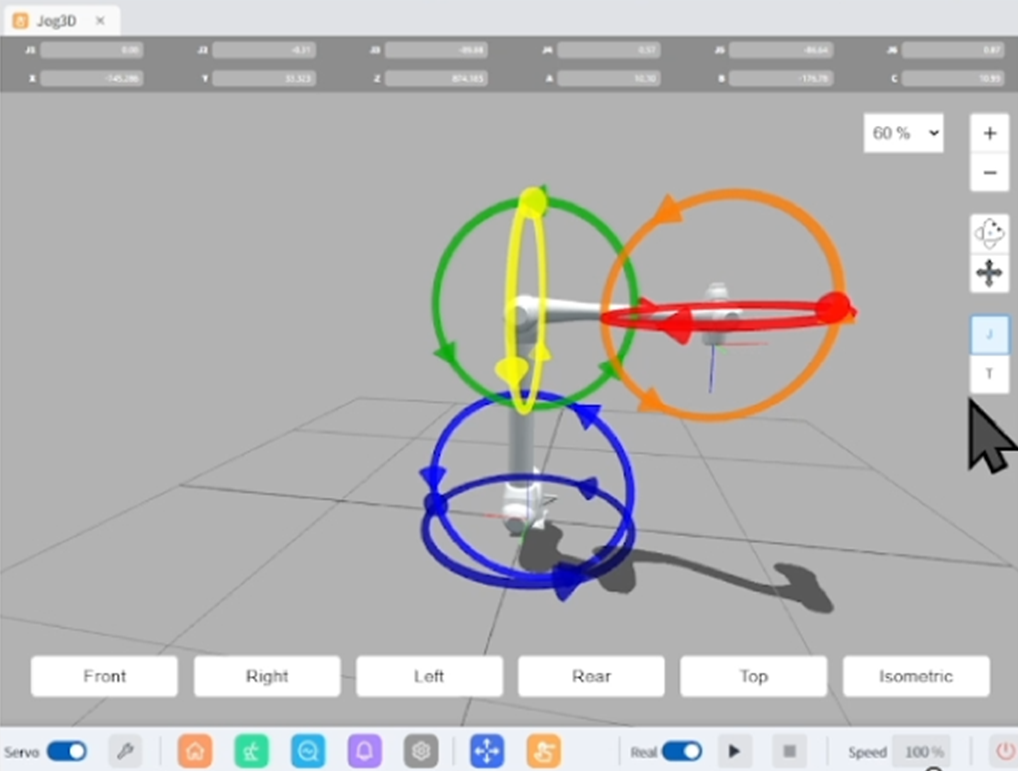
Joint Jog type
Joint Jog type
Function that can Jog each axis of Joints is provided.
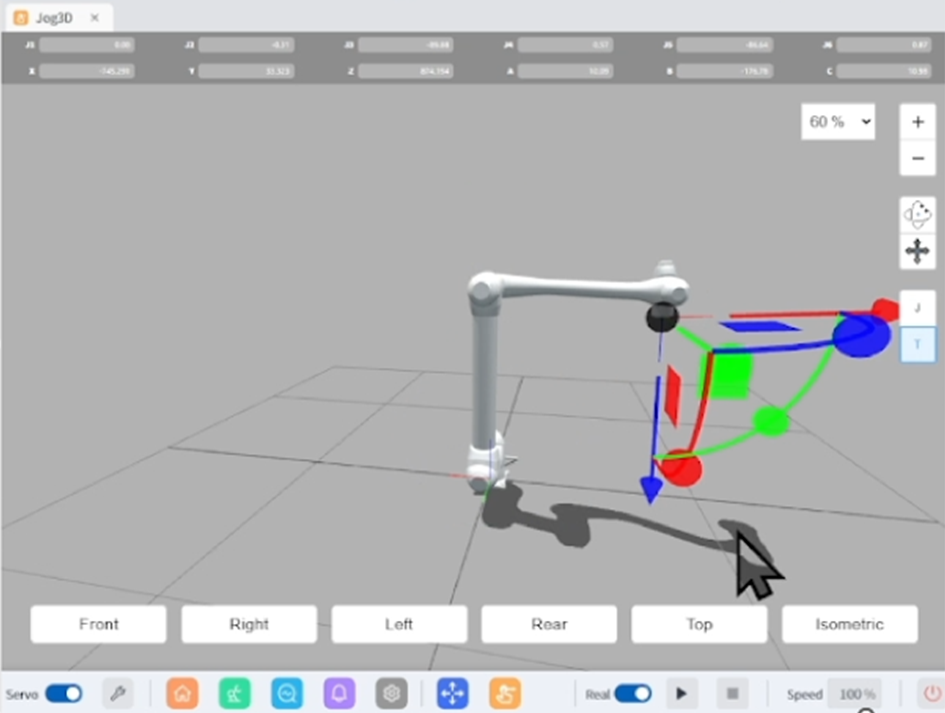
Task Jog type
Task Jog type
Function that can teach robot based on the TCP in Task Space is provided.
Translational movement
Translational motion in the X, Y, and Z axis.
Translational movement on XY, YZ, and ZX plane.
Free movement
Rotational Movement
Rotational movement in the X, Y, and Z axis.
Import
The import code in Code Editor of SimulatorJog3D will be displayed like this:
Library:
import SimulatorJog3d, { SimulatorJog3dAPI }from './uc/simulator.jog3d;'Source codes:
<SimulatorJog3d moduleContext={null} id="simulatorjog3d_a727"></SimulatorJog3d>Property
Properties | Type | Default Value | Description | |
|---|---|---|---|---|
| 1 | showBaseCoordinate | Textbox | true | Whether to show base coordinate system |
| 2 | showWorldCoodinate | Textbox | true | Whether to show world coordinate system |
| 3 | useGlobalCoordinate | Textbox | false | In general, the world coordinate system is the same as the scene’s reference coordinate system (global). |
| 4 | useSynchronizationInstallPose | Textbox | false | Apply the install pose to the robot’s posture |
| 5 | useSynchronizationWorld | Textbox | true | Apply the world coordinates of the robot parameters to the simulator. |