V3.2.0 Official
Hello. This is Dr.Dart Manager.
Please note that all Dart-Suite products updated from Dart-Suite V3.2.0BETA to V3.2.0.
Note.
Connection may not be possible during Dart-IDE, Dart-Store, Dart-APIs, and Dart-Developers server maintenance and updates.
New Features
The main features of Dart-Suite V3.2.0 are as follows.
<Dart-Platform & Module> | |
1.Improved User Interface | |
 | |
|
|
 |
 |
|
|
| 
|
<Dart-IDE> | |
|
|
|
|
Release Note
Version: Dart-Suite V3.2.0
Released at:
1. Dart-SDK
Version: V3.2.0
2. Dart-IDE
Version: V2.1.0 (3/15 Release)
3. Dart-Platform
Version: V3.2.0
Categories | Features | ||
|---|---|---|---|
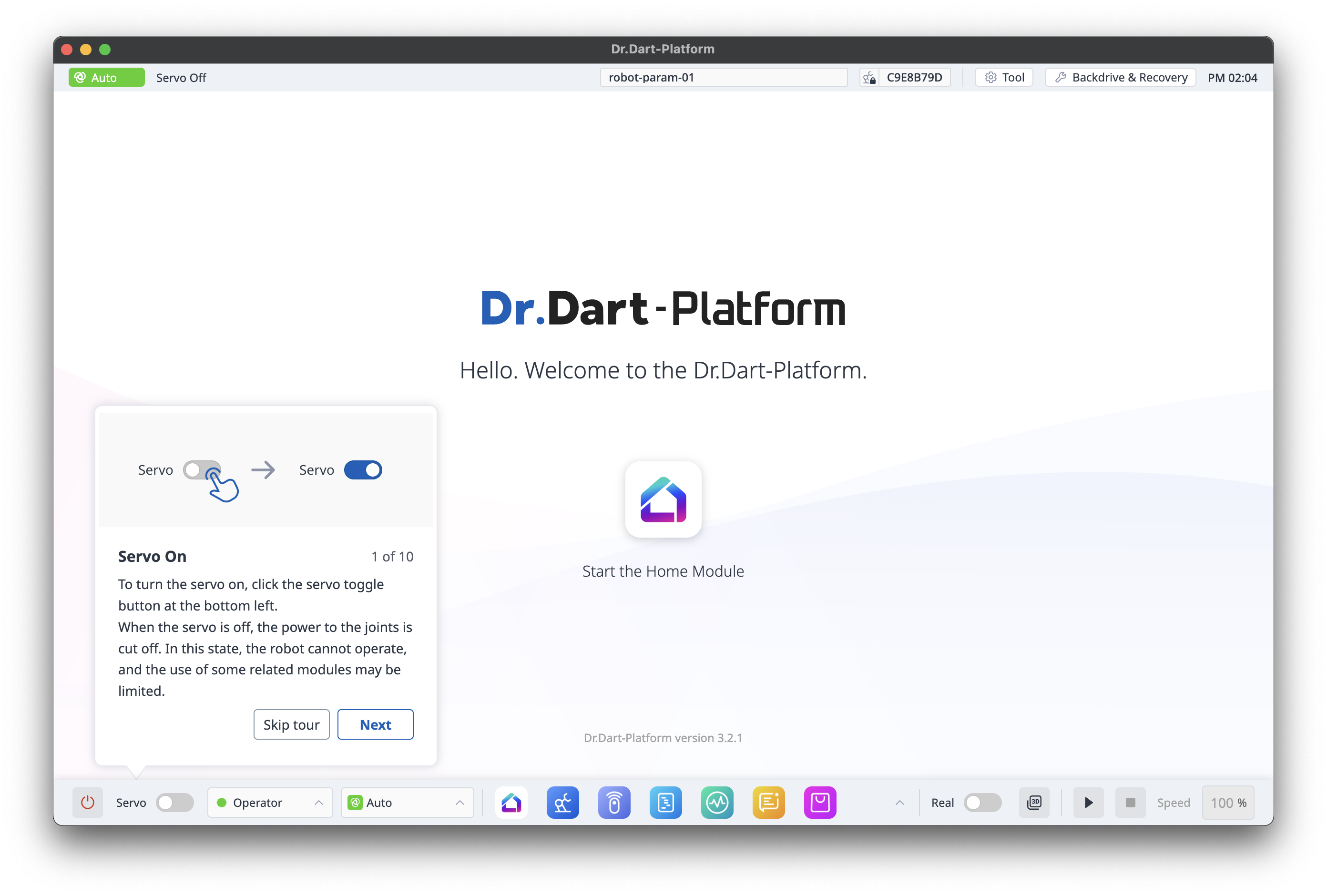
| 1 | UX | New | "Provide a coach mark popup on the first startup of Dart-Platform 3." |
| 2 | Theme | Bug | "Fix the issue where styles imported by the module are duplicated every time the module is updated or reinstalled." |
| 3 | Header/Footer
| New | "Improve the usability of the Header/Footer." |
| 4 | "Change so that the backdrive function operates only when an actual robot is connected." | ||
| 5 | Bug | "Fix the issue where the Header or Footer area, which is on a lower layer than the System Dialog that appears, is touchable after the Dialog occurs." | |
| 6 | "Fix the issue where selecting the Play button to choose a Module does not trigger a toast popup." | ||
| 7 | "Fix the issue where the servo switch is deactivated for 10 seconds when Servo On fails due to STO/SS1 status." | ||
| 8 | "Fix the issue where attempting to Servo On after running Dart-Simulator with A/E series models causes a Real mode activation dialogue popup." | ||
| 9 | "Fix the intermittent issue where the status information in the Header is displayed as 'Disconnected'." | ||
| 10 | "Fix the issue where a parameter mismatch icon appears when setting Flange I/O in the robot parameter module." | ||
| 11 | "Fix the issue where servo on does not work at once in virtual mode after connecting to A/E robot models." | ||
| 12 | "Fix the issue where a parameter mismatch icon appears under certain conditions when setting tool center, tool weight, tool shape, and safety area in the robot parameter module." | ||
| 13 | "Fix the intermittent issue where information is not updated when entering the dashboard through the simulation button in the Footer during program execution and checking information." | ||
| 14 | "Fix the issue where entering recovery mode does not work in virtual mode." | ||
| 15 | Update
| New | "Improve to shorten system update time." |
| 16 | Bug | "Fix the issue where the installation popup does not appear upon robot reboot, even though there is a campaign registered on the OTA server." | |
| 17 | "Fix the issue where a toast popup occurs for campaign download failure on the Dart-Platform without control authority." | ||
| 18 | "Fix the issue where, after a module package update, when control is gained on a different Dart-Platform, the module does not appear as updated." | ||
| 19 | "Fix the issue where the update toast popup closes when switching to automatic mode while the popup is displayed." | ||
| 20 | "Fix the issue where, if a campaign expires while a campaign download/update toast popup is displayed, the related toast for the expired campaign does not appear." | ||
| 21 | "Fix the issue where a white screen appears shortly after uploading an OS update package file in Teaching Pendant > Settings > Update." | ||
| 22 | "Fix the issue where the message displayed during update/deletion does not match the screen definition document when both the module to be deleted/updated and the linked modules are running." | ||
| 23 | "Fix the crash that occurs when updating after selecting a large update file in the Teaching Pendant." | ||
| 24 | power off
| New | "Fix the issue where the Dart-Service simulator does not reconnect to Dart-Platform 3 after restarting." |
| 25 | Bug | "Prevent shutdown via the power button during program execution." | |
| 26 | "Prevent shutdown via Normal I/O signal during program execution." | ||
| 27 | "Fix the intermittent issue where the shutdown popup via the power button is not displayed before program execution." | ||
| 28 | "Fix the intermittent issue where the shutdown popup does not appear after powering off." | ||
| 29 | Paid module | New | "Develop support for paid modules in Dart-Store." |
| 30 | control
| Bug | "Fix the issue where the control request popup remains when the Dart-Platform that sent the request is closed before the request is accepted/rejected." |
| 31 | "Fix the issue where control cannot be requested again if there is no response after a control request. Allow forced recall during control retrieval." | ||
| 32 | Keyboard | Bug | "Fix intermittent keyboard input issues in the Teaching Pendant." |
| 33 | Safety | Bug | "Fix the issue where the pinch escape popup does not appear when the pinch escape button is activated in Cockpit." |
| 34 | "Fix the issue where the pinch escape popup does not close at a specific path." | ||
| 35 | Etc
| New | "Improve to prevent module installation when installation is not supported." |
| 36 | "Enhance to display a connection error popup when changing the robot connected to the controller, and enable data backup or initialization." | ||
| 37 | "Improve to display a popup and prevent UI manipulation during Handguiding mode." | ||
| 38 | "Modify to prevent the toast popup from appearing when the robot parameter settings information does not match the robot information." | ||
| 39 | "Improve to allow module installation even in safety stop/emergency stop states." | ||
| 40 | "Apply module installation scenarios based on the status of the connected robot in Dart-IDE." | ||
| 41 | "Fix the issue where Dart-Platform 3 crashes when a crash occurs in a Dart-Module at a specific path." | ||
| 42 | "Modify to activate the Modbus slave function of the controller during boot." | ||
| 43 | "Improve Dart-IDE so that when building & running a module, it updates if the module version is the same or greater." | ||
| 44 | Bug | "Change to disable context menu support in the text UI area." | |
| 45 | "Fix the issue where the default modules are not installed after deleting and restarting the container in Dart-Service, then reconnecting to Dart-Platform." | ||
| 46 | "Fix the issue where a factory reset failure popup occurs in Dart-Platform for Mac or Dart-Platform for Windows, but the actual factory reset process is successful." | ||
| 47 | "Fix the issue where executing Build & Run on a module package in Dart-IDE that does not contain ACTION_MAIN and CATEGORY_SCREEN results in a failed execution." | ||
| 48 | "Fix the issue where the message indicating the Nudge feature activation appears in the Protective Stop popup even when the Nudge feature is disabled." | ||
| 49 | "Fix the issue where, when multiple Protective Stop signals are set in Safety Input settings, all Protective Stop port numbers are displayed, not just the signals that entered a specific port."  | ||
| 50 | "Fix the intermittent issue where the connection is occasionally interrupted and reconnected when installing large module files." | ||
| 51 | "Fix the issue where, when an error occurs in Handguiding mode, the robot status is incorrectly displayed as Handguiding." | ||
| 52 | "Fix the issue where a data synchronization error popup occurs intermittently when connection is occasionally unavailable during boot." | ||
| 53 | "Fix the issue where the Jog function does not stop when a control request is received during Jog operation." | ||
| 54 | "Fix the intermittent issue where the connection between Dart-Platform and the controller is occasionally lost when the Jog button is touched quickly." | ||
| 55 | "Fix the intermittent issue where the language set by the user in settings is occasionally changed late during boot." | ||
| 56 | "Fix the issue where the device continues to reboot after a failed update by adding rollback functionality in case of update failure." | ||
| 57 | "Fix the issue where Dart-Platform for Mac or Dart-Platform for Windows does not automatically restart after completing an update." | ||
| 58 | "Fix the intermittent issue where a synchronization error popup occurs occasionally when the robot connection is disconnected and then reconnected." | ||
| 59 | "Fix the issue where the popup message for terminating connected modules does not appear when deactivating the Pip module." | ||
| 60 | "Remove the restart button from the inverter connection error popup." | ||
| 61 | "Fix the intermittent occurrence of robot series compatibility errors during boot." | ||
| 62 | "Fix the issue where safety data is not initialized during Factory Reset." | ||
| 63 | "Fix the issue where Restore Point is not displayed after Application Update following Factory Reset." | ||
4. Dart-Services
Version: V2.1.0
5. Dart-Module
Module | Features | ||
|---|---|---|---|
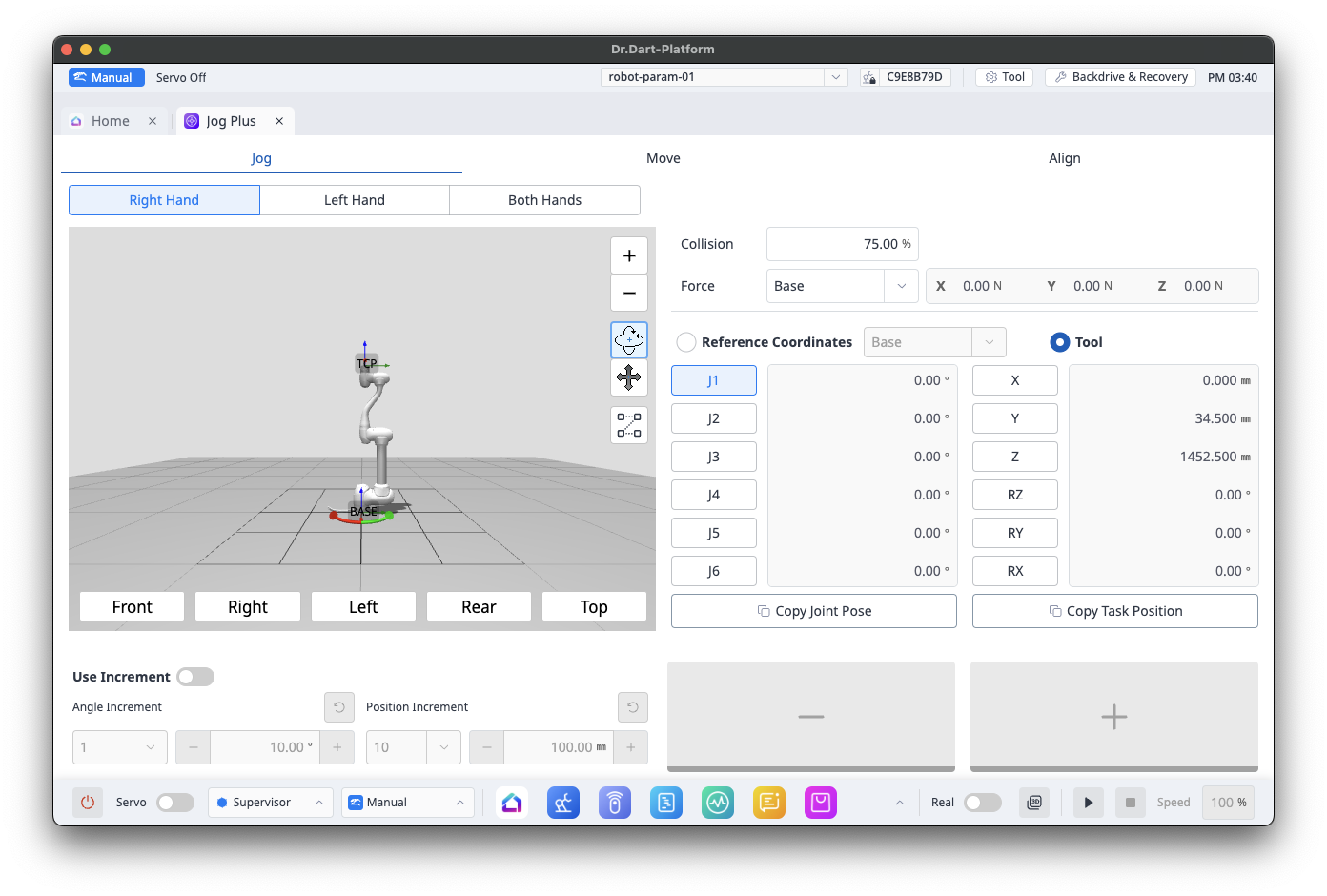
| 1 | Jog Plus | ||
| 2 | New | "Overall UI/UX improvement. Support three tabs: jog, move, and align, providing functionality equivalent to legacy. Add functionality for left-handed, right-handed, and ambidextrous operation."
| |
| 3 | footer | ||
| 4 | Bug | "Fix the issue where some phrases do not immediately change when the language is changed during execution." | |
| 5 | "Improve usability of Copy Pose and Copy Position buttons." | ||
| 6 | "Enhance the 3D simulator." | ||
| 7 | "Fix the issue where Force Monitoring values are not displayed according to the selected coordinate item" | ||
| 8 | backdrive | ||
| 9 | Bug | "Fix the issue where servo on fails in backdrive mode at specific paths." | |
| 10 | "Fix the issue where Force Monitoring values are not displayed according to the selected coordinate item" | ||
| 11 | Recovery | ||
| 12 | Bug | "Fix the issue where the drop-down items in the Display Coordinates drop-down menu are displayed in the wrong position on the recovery screen." | |
| 13 | Settings | ||
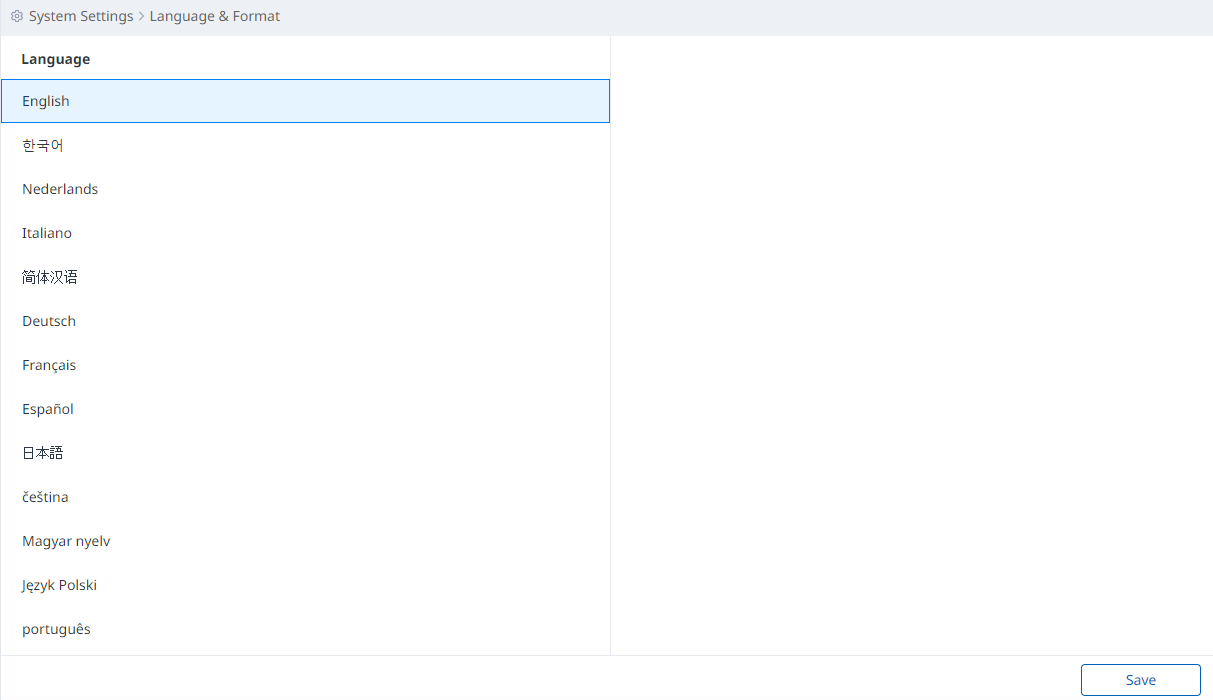
| 14 | New | "Add support for 11 additional languages beyond English and Korean: Dutch, Italian, Chinese, German, French, Spanish, Czech, Hungarian, Polish, and Portuguese." 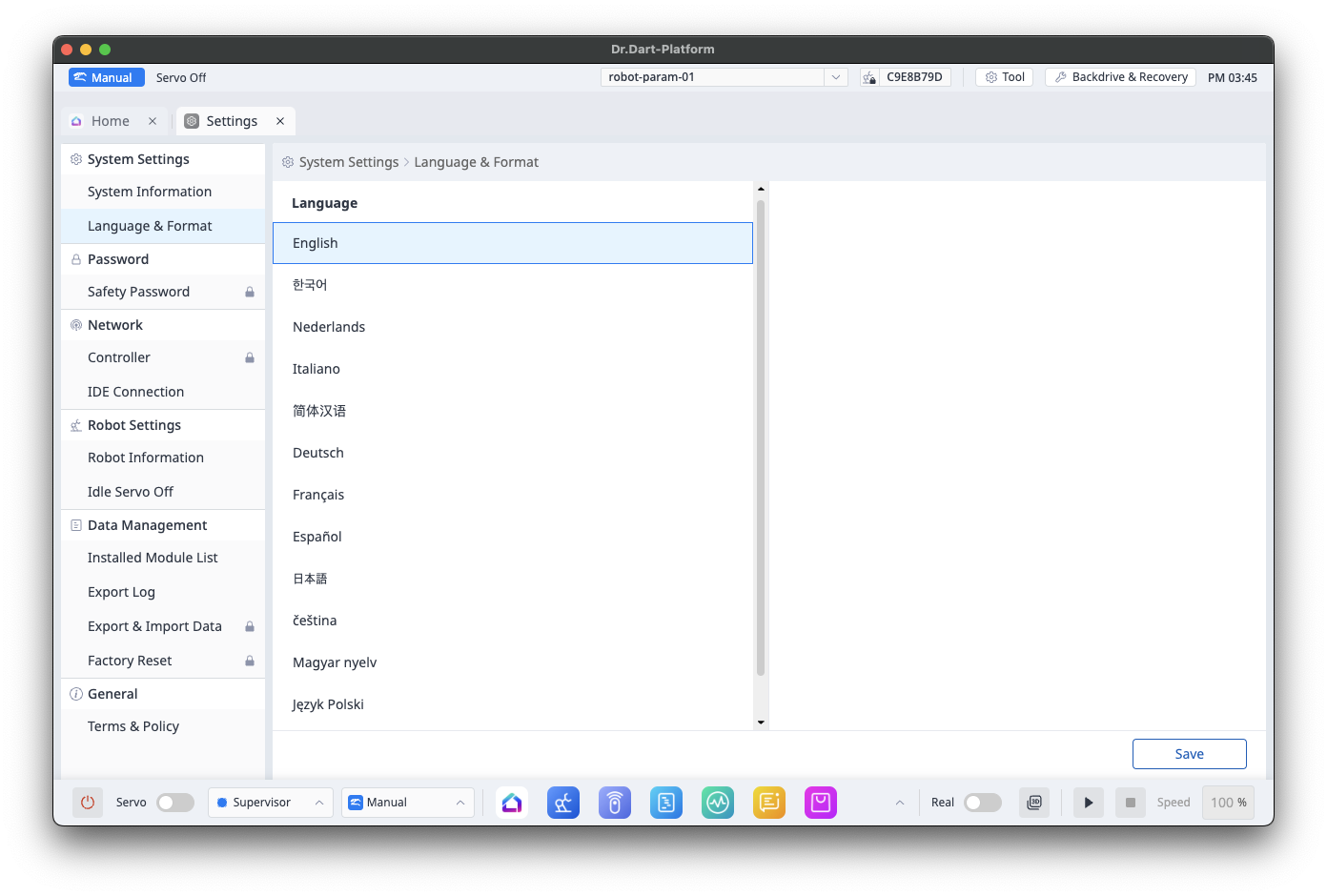 | |
| 15 | "Add system restore functionality." | ||
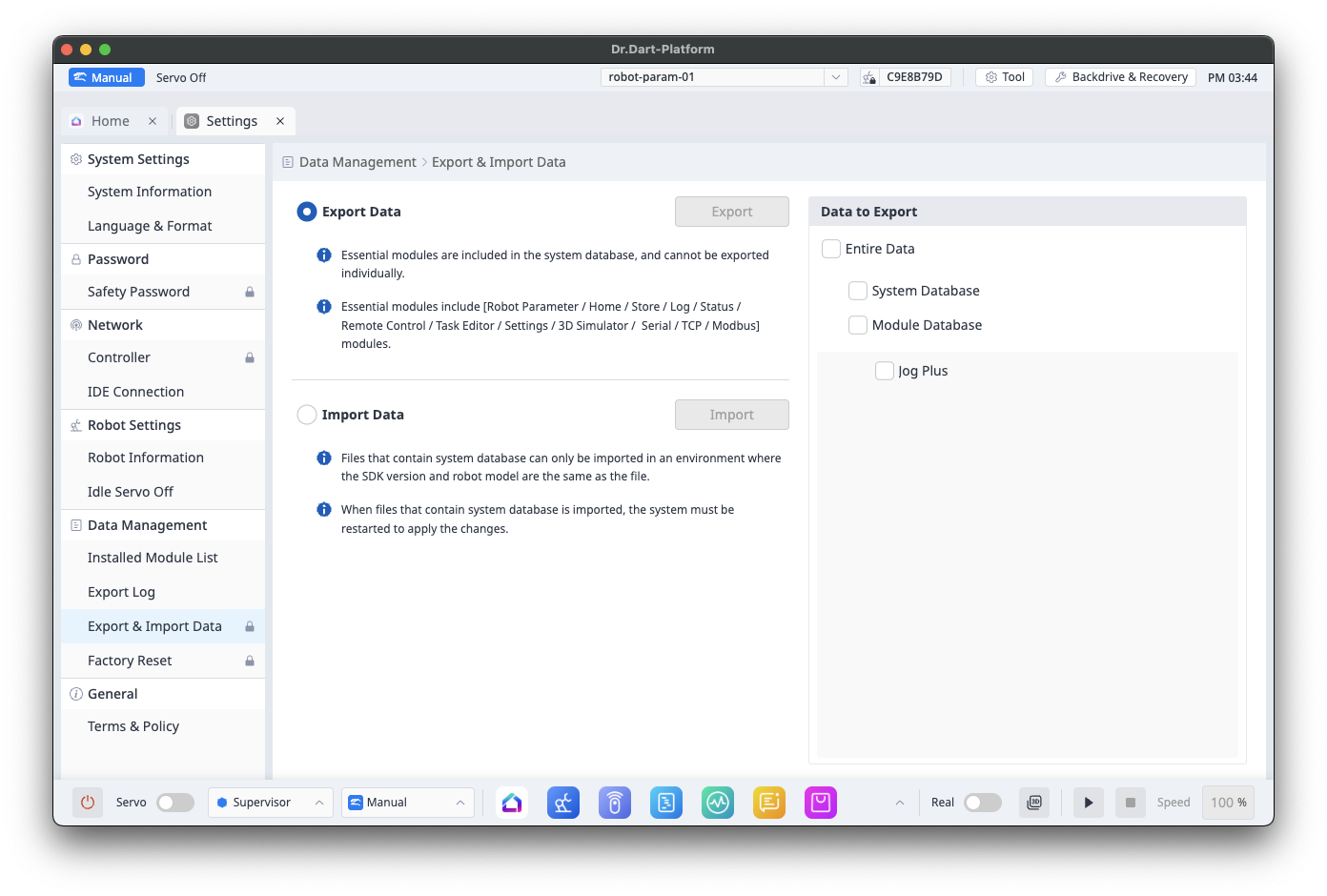
| 16 | "Add Data Export & Import functionality."
| ||
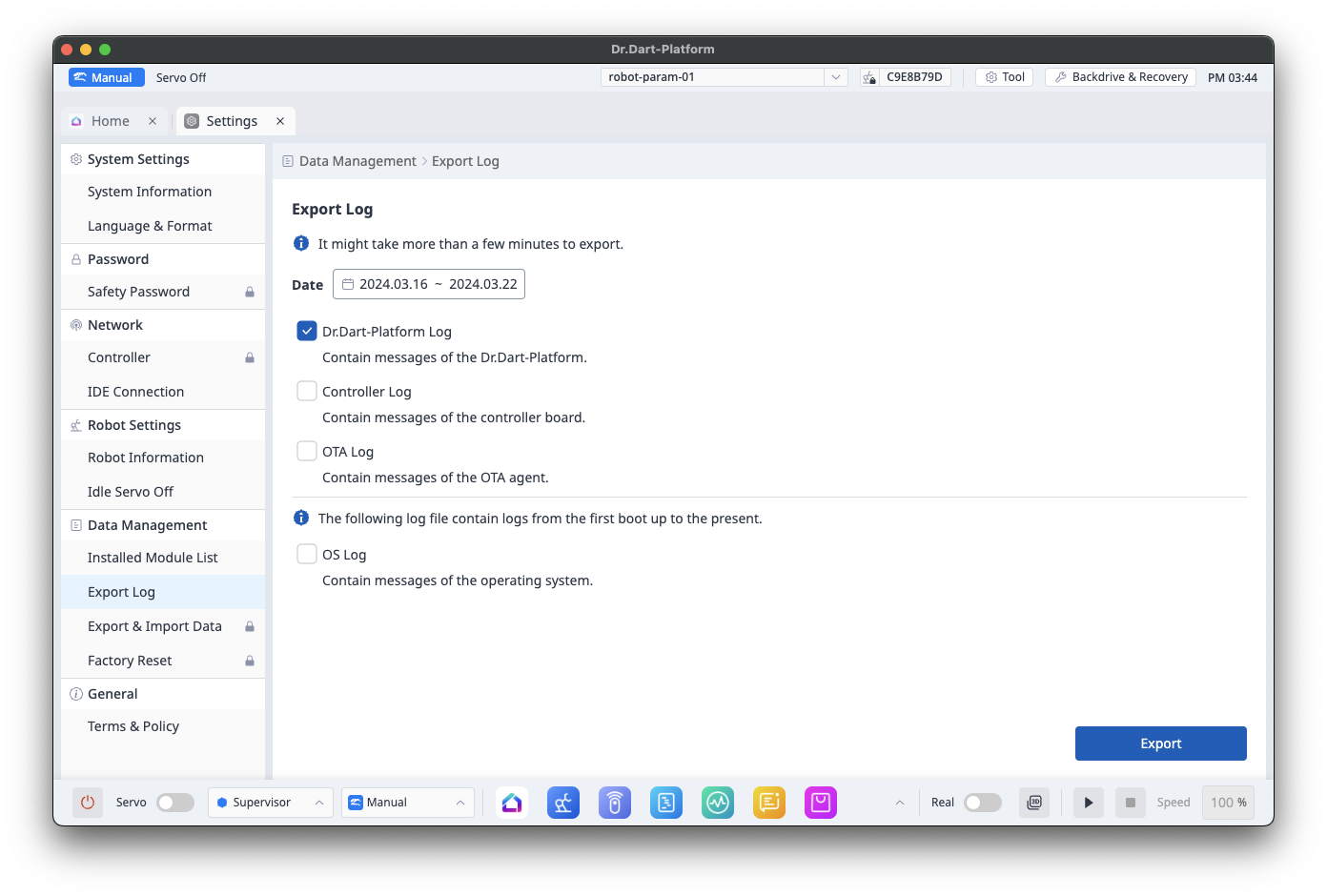
| 17 | "Develop 'Export Log' feature."
| ||
| 18 | "Improve usability of the Update popup." | ||
| 19 | "Hide the System Update/Restore menu when not connected to an actual robot." | ||
| 20 | "Improve UX on the Update screen." | ||
| 21 | "Add Inverter, Safety Board, and Platform version information to the System Update screen." | ||
| 22 | Bug | "Fix the issue where the Controller settings IP change value is not saved at a specific path." | |
| 23 | "Fix the issue where opening a local OS package file fails when selected from the system update screen." | ||
| 24 | "Fix the issue where the application version is not displayed when performing a system restore at a specific path." | ||
| 25 | "Disable Update and Restore functionality in Virtual Mode." | ||
| 26 | "Fix the issue where campaign information is displayed incorrectly when campaign validation fails." | ||
| 27 | "Fix the issue where the button displays 'Download' after completing campaign download." | ||
| 28 | "Fix the issue where selecting .gz files is not possible when performing Robot Update > Update > Find File." | ||
| 29 | "Fix the issue where selecting inaccessible menus during Task Play results in a toast icon displayed as a Warn Icon." | ||
| 30 | "Fix to not display the changeNote in the system update package if it exists." | ||
| 31 | Task Editor | ||
| 32 | New | Enhancement Property of Set Command. | |
| 33 | Add new signal commands(Add, Get, Set, Delete) Currently Support digital I/O, Modbus TCP and Modbus RTU. Other protocols will be supported soon. | ||
| 34 | "Enable task saving by pressing Ctrl+S after editing the task name." | ||
| 35 | “Provide a function to overwrite multiple files with the same name when importing multiple Task files.” | ||
| 36 | Bug | Add missing drl auto completion on custom code command | |
| 37 | "Fix the issue where the Move command is inconsistently disabled based on the Relative/Absolute option values at a specific path." | ||
| 38 | "Fix the issue where the Task Stop button is active in Hand Guide Popup HGC Running state and causes a Protective stop when clicked." | ||
| 39 | "Fix the issue where, after setting Wait Digital Input Tool_In in the Wait command and then moving from the Command tab to the Property tab, the Command row incorrectly displays as Digital In." | ||
| 40 | “Fix UI error when playing and stopping two motion commands with different Speed Separate values.” | ||
| 41 | "Fix the issue where coordinates are not initialized when using the Cockpit GetPose button in motion commands." | ||
| 42 | “Fix the issue where the annotation value is not displayed in the Popup and Sub Task Command." | ||
| 43 | "Fix the issue where the Move To button does not work to move to arbitrary positions in Move L, C, JX, SX commands." | ||
| 44 | "Fix the issue where it's possible to create variables with the same name in the Global Variable command block." | ||
| 45 | "Fix the issue where the Move command does not move as configured when set to Relative mode." | ||
| 46 | "Fix the issue where the value entered in Set Command > Analog Output Signal is incorrectly input." | ||
| 47 | "Fix the issue where Pose type variables registered in System, Global, Define variables do not move to the correct position when linked in motion commands." | ||
| 48 | "Fix the issue where global variable values registered in the Monitoring tab do not update after program termination at a specific path." | ||
| 49 | "Fix the issue where the Variable Name created in Custom Code on A/E models is not displayed in the autocomplete field." | ||
| 50 | "Fix the issue where the Variable value set in User Command is maintained even after deletion until re-entering the User Command Property tab." | ||
| 51 | "Correct the naming error for Controller Digital Input. Change Digital Input 17-20 to SI 1-4." | ||
| 52 | "Fix the issue where coordinates are not updated when pressing the Cockpit Get Pose button in motion commands." | ||
| 53 | "Fix the issue where the Array Type of Variable Type changes to dl in System variables after program play." | ||
| 54 | "Fix the issue where deleting a Global Variable added to the Monitoring tab triggers a 'Missing System Variable' popup." | ||
| 55 | "Fix the issue where icons registered in the User Command module are not displayed." | ||
| 56 | "Fix the issue where variables created in the Define Command are reset when the program is terminated." | ||
| 57 | "Fix the issue where Task Play is possible even when all Position values in the Move L Command are disabled." | ||
| 58 | "Fix the issue where some Task Files are not deleted after deleting all Task Files saved in Task Editor and restarting." | ||
| 59 | "Fix the issue where the Weight Measure Command is disabled when the program is terminated if it's set to a Global Variable." | ||
| 60 | "Fix the issue where the Current/Expand All/Collapse All/Debug/Log options in the navigation area on the left side of the screen cannot be selected during program execution." | ||
| 61 | "Fix the issue where the recommended function list in the If and Custom Code commands displays a different number of Flange digital input/output ports than the actual number." | ||
| 62 | "Fix the issue where log information executed in the Task Editor module is not displayed in the log module." | ||
| 63 | "Fix the issue where, when using the Save As feature to save a file, the original file is displayed instead of the saved file." | ||
| 64 | "Fix the issue where Define variables are not added in UserCommand." | ||
| 65 | "Fix the return handling error in the 'gen_command_call' interface of the User Command module.”
CODE
| ||
| 66 | "Fix the issue where a pop-up for import failure does not occur when attempting to import an invalid drl file in Custom Code." | ||
| 67 | "Fix the issue causing Dart-Platform to crash when performing a search with regular expressions enabled in Task Editor, including the use of * for wildcard search." | ||
| 68 | "Fix the issue where values set in the Set Command are not reset to the default value in the dropdown box after deletion." | ||
| 69 | “The layout issue with the dropdown menu for Package Name in Compliance and Force Command has been fixed.” | ||
| 70 | "Icons are displayed in the project screen for the current file being used." | ||
| 71 | "When the Current button is pressed in the left navigation menu, fixed the issue where all closed Command blocks were expanded." | ||
| 72 | "Correct the layout issue in the Global/Define Variables Command where error messages prevent input in certain areas when they occur." | ||
| 73 | “The issue where the Get Pose, Move To, and Reset buttons are disabled when changing the Task Type Pose variable to Tool and then changing it to Joint Type in the Move Command has been resolved.” | ||
| 74 | “Change the default state of the Reset button in the Move J Command to be disabled.” | ||
| 75 | "Fixed the issue where the program could be executed without setting the Sub Task Start Command." | ||
| 76 | “Fix the issue where system variable data is not synchronized when control authority is changed.” | ||
| 77 | “Fix the issue where the updated coordinate values are not reflected when changing the coordinates after adding a Move Command.” | ||
| 78 | “Fix the issue where incorrect commands are highlighted in a specific path.” | ||
| 79 | “Implement a warning popup when deleting a currently used Global/Define/System Variable, and disable the corresponding commands that were in use.” | ||
| 80 | Robot Parameter | ||
| 81 | I/O Alias | Bug | “The labeling for Port 17-20 in Controller Digital I/O > Controller Digital Input has been changed to SI 1-4.” |
| 82 | Mount | Bug | "Fix the issue where pressing the Stop button during Auto Measure in Mount causes the Auto Measure Complete popup to occur." |
| 83 | User Coordinates | Bug | “The issue with the UI displaying incorrect user coordinate system axes in the 3D Simulator has been fixed.” |
| 84 | Home Position | Bug | “The issue where homing with the Home Position button would cause movement to the Default Position instead of the Custom Position has been resolved.” |
| 85 | Cockpit | Bug | “The issue where the image of the new Cockpit was displayed when connected to the old Cockpit has been resolved.” |
| 86 | Flange I/O | Bug | When checking the End Effector Power Interlock area in the Flange I/O tab on the E model, it is displayed as X1 / X2. |
| 87 | “The issue where default values were not being populated when entering Flange I/O has been fixed.” | ||
| 88 | “The issue where Flange I/O settings changes were incorrectly flagged as different from robot settings and module file settings has been resolved.” | ||
| 89 | Tool Settings | Bug | “The Tool Center Point will now display a toast popup notification upon completion of the Auto Calculate operation.” |
| 90 | “The issue causing a crash when deleting a Shape Type in Tool Shape Item editing mode has been resolved.” | ||
| 91 | “The issue preventing Tool Weight Auto Measurement on the A0509S model has been fixed.” | ||
| 92 | "Fix issues related to Auto Measure in Tool Weight." | ||
| 93 | Safety Zone | Bug | “The issue where changes made only in the module file to Safety Zone items were not synchronized with the robot, resulting in the previous settings still being indicated as changes in the module file, has been resolved.” |
| 94 | "In the parameter settings of the CustomZone item, when the 'collaboratize zone' use button toggle is turned on, the confirm button is disabled, making it impossible to change the settings." | ||
| 95 | "Fix the issue where the application crashes when setting and applying Tool Orientation in the Safety Zone / Edit Settings." | ||
| 96 | "Fix the issue where the robot does not appear in the 3D simulator when selecting the Z value of Point 1 after entering Point 1 and Point 2 in the Crushing zone setting popup in the Safety zone." | ||
| 97 | "Fix the issue where turning off and saving the Safety Zone activation toggle does not apply the change." | ||
| 98 | "Fix the issue where the 7th port is displayed as “Port Port7” when checking the Designated Zone Detection in the Safety Zone." | ||
| 99 | "Fix the issue where the application crashes when saving in the Parameter tab during zone settings in the Safety Zone without entering some values." | ||
| 100 | "Fix the issue where the Collision Sensitivity value is confirmed as 20% in the Parameter tab after adding a Collision Sensitivity Reduction Zone in the Safety Zone." | ||
| 101 | “Correct the mislabeling of the category name in the Safety Stop Modes area of the Safety Zone Parameter tab from 'TCP/ Robot Position Limit Violation' to 'TCP Force Limit Violation.'” | ||
| 102 | Review Popup | Bug | "Fix the issue where TCP/Robot and Collision are displayed when checking Robot Limit in the Safety Review pop-up." |
| 103 | "Fix the issue where the 'New File' button appears when calling the 'Saved Files' popup by clicking the dropdown for 'Robot Parameter' file under Header." | ||
| 104 | etc | Bug | "Fix the issue where the 'Complete' popup appears immediately upon starting 'Auto Measure Start' without applying the 3-Pos signal." |
| 105 | "Fix the issue where after changing settings, selecting another configuration file from the Saved Files popup via the Meatball menu, and choosing 'open file' > 'continue without saving' without checking 'continue without saving', then selecting the Continue button does not open the selected file." | ||
| 106 | Status | ||
| 107 | New | "Modify to display the correct setting UI and fix setting value errors according to the Flange HW for each robot model." | |
| 108 | Bug | "Disable the ability to test Digital / Analog Input when the Controller is in Analog Input / Real Mode On state." | |
| 109 | "Fix the issue where the Controller Analog Output value intermittently reverts to the previous value when changed via slider movement." | ||
| 110 | "Fix the issue where a [1.5006] warning popup occurs upon first entering the Status module in robots equipped with the New Flange H/W." | ||
| 111 | "Change the display of Controller Digital Input to Port 17-20 - SI 1-4." | ||
| 112 | "Modify to ensure that input signals are preserved when switching from Real Mode ON to OFF in A/E models." | ||
| 113 | "Fix the issue where values do not update when converting between V and mA units." | ||
| 114 | Logs | ||
| 115 | Bug | “Fix issue that date filter is not displaying the current date.” | |
| 116 | store | ||
| 117 | Bug | "Fix the issue where the Copy button does not work when selected after choosing Share in a module." | |
| 118 | Home | ||
| 119 | Bug | "Fix the module icon alignment issue in specific situations." | |
| 120 | Remote Control | ||
| 121 | New | "Change Control Input 16 ~ 20 to Safety Input 1 ~ 4." | |
| 122 | Bug | "Fix the issue where remote control does not work after losing and regaining control authority." | |
| 123 | "Fix the issue where the selected Task file remains even after it has been deleted in the TaskEditor." | ||
| 124 | "Fix the issue where information about the previous Task operation (only cycle count) remains when entering Remote mode." | ||
| 125 | "Fix the issue where moving to the Normal I/O menu leads to entering Flange I/O." | ||
| 126 | "Fix the issue where changes to selected Module or Task are not reflected when made externally." | ||
| 127 | "Fix the issue where entering Remote Control while in Servo On state causes Servo Off state, and even applying Servo On signal does not activate Servo On." | ||
6. Dart-Store
Version: V2.1.0 (3/15 Release)
7. DRL
Version: V3.2.0
8. Known Issues
Simulator issue
Issue: When moving the robot on the simulator in a task coordinate system, the robot in the simulator move with vibration.
Alternative: Use real robot when moving in a task coordinate system.
Plan : Scheduled to be modified so that it can be not trembled.
Issue: When update image to use ‘Update Images', all simulator’s installed module and database will delete like factory reset.
Plan : Scheduled to be modified so that it can be not reset.
Task Editor Module issue
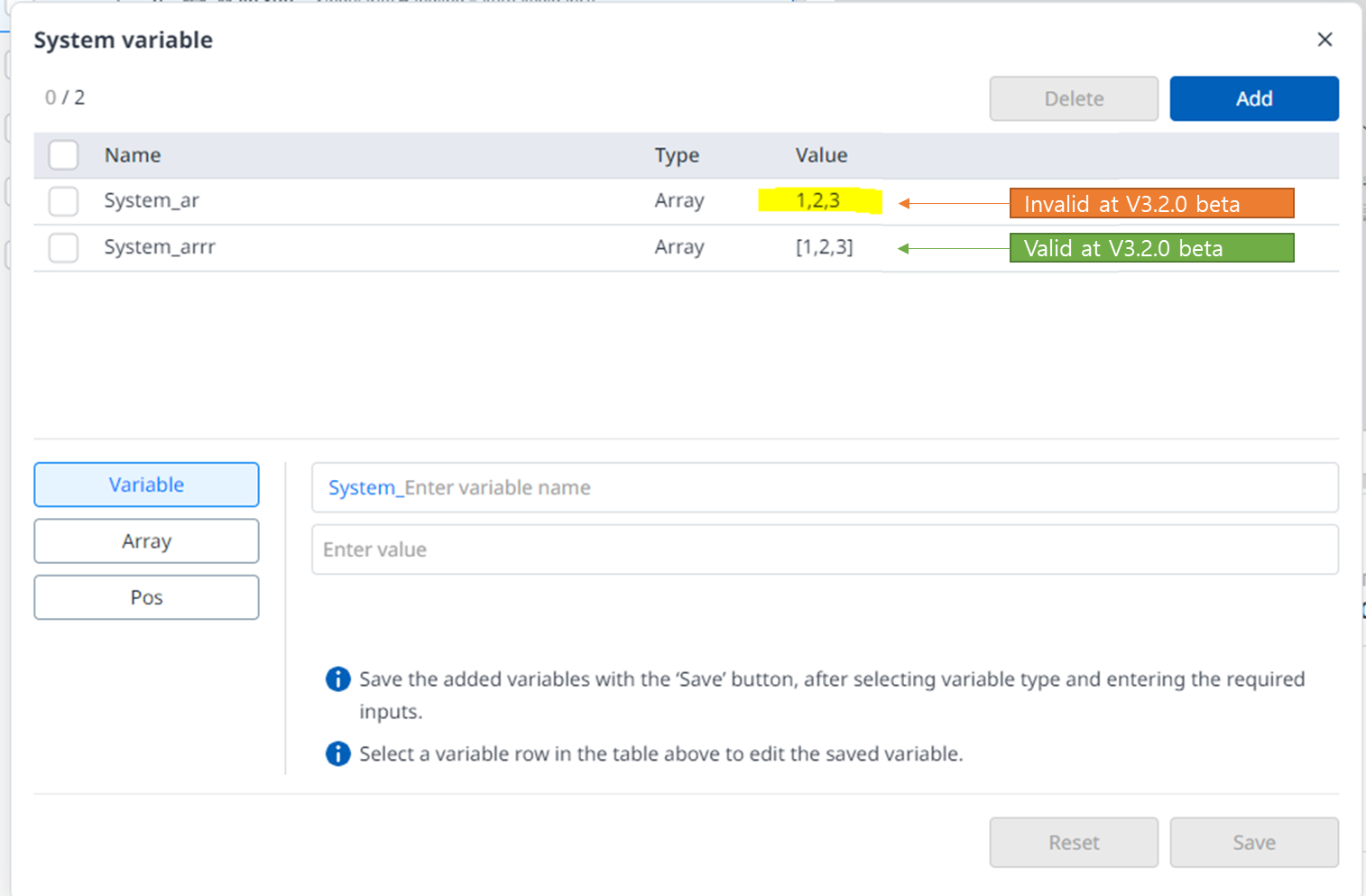
Issue: System Array Type changes to Variable Type after Task Play.
Alternative: When using a variable array of system, global, or define type, use ‘[' ,']’.
Plan: Scheduled to be modified so that it can be used in 1, 2, and 3 formats.
Update guide
Here's how to update Dart-Suite V3.2.0BETA to V3.2.0.
In the next version, we plan to change the program to enable installation without deleting, and we plan to allow users to install multiple versions of Dart-Services and Dart-Platform by changing the folder name in the installation path.
After deleting existing Dart-Services, download and install new Dart-Services.
After deleting existing Dart-Platform, download and install new Dart-Platform.
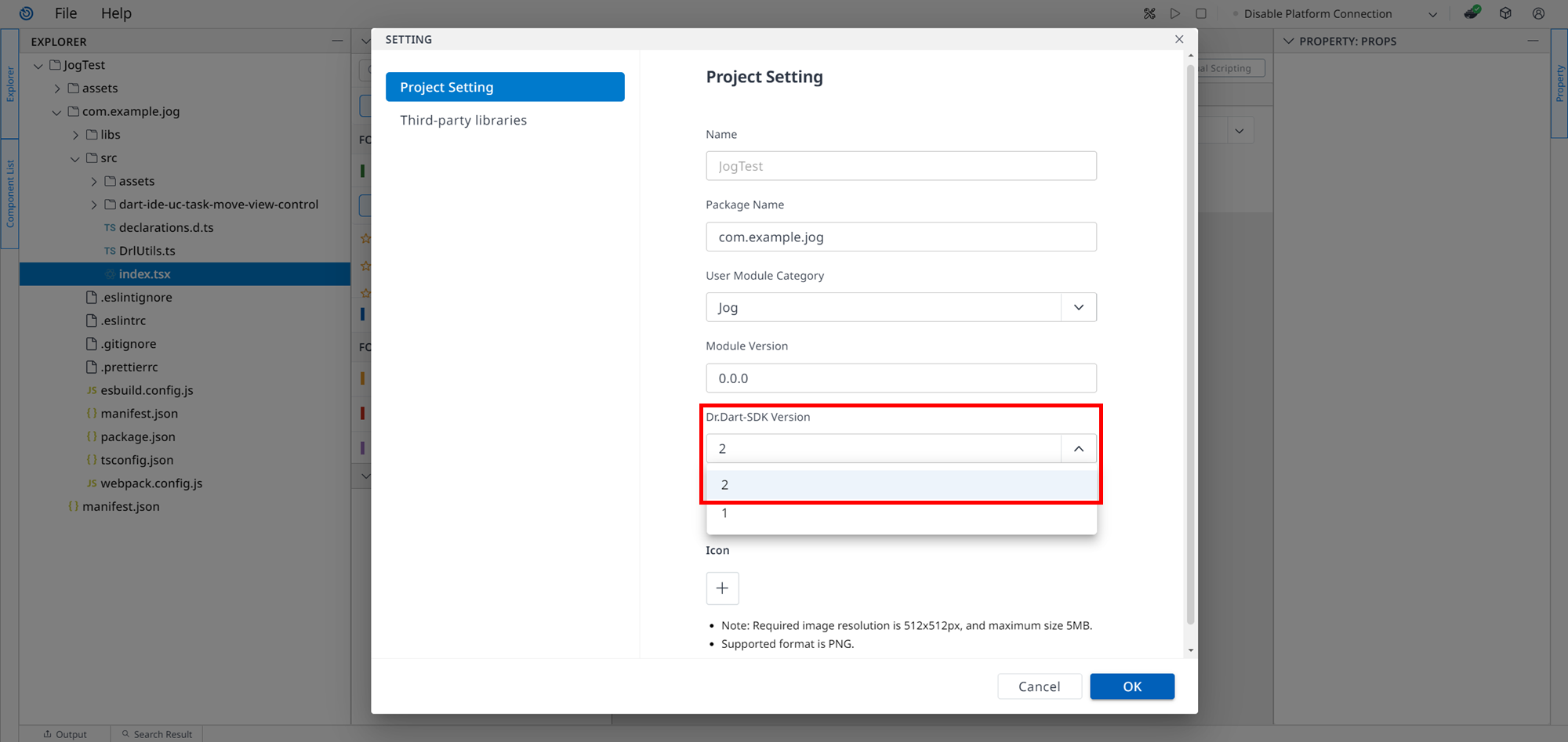
Updating my project from SDK1 to SDK2 in Dart-IDE:
Step 1. Access to the Dart-IDE.
Step 2. After opening the project, click
File▸Project Setting.
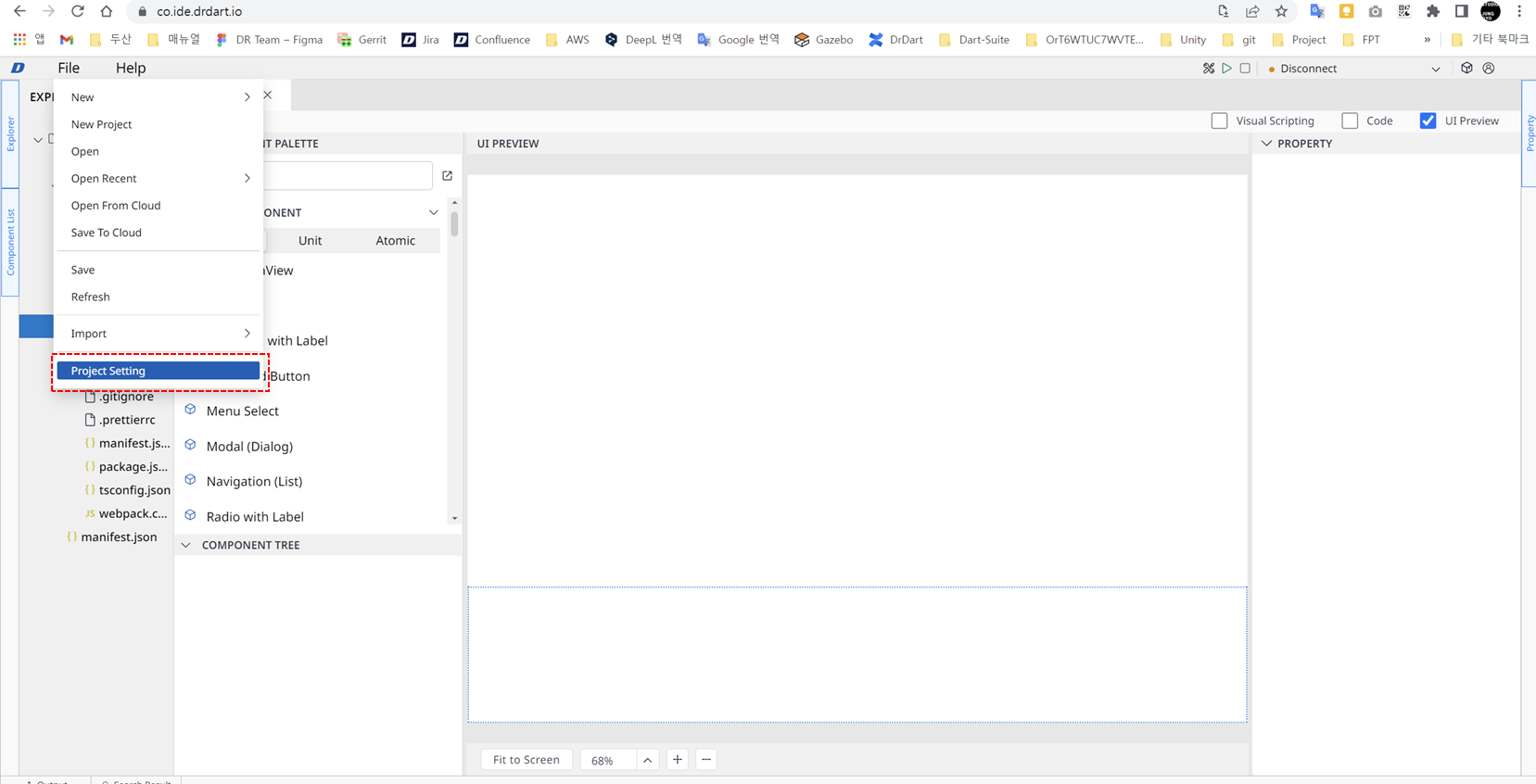
Step 3. Change Dr.Dart-SDK Version from 1 to 2.
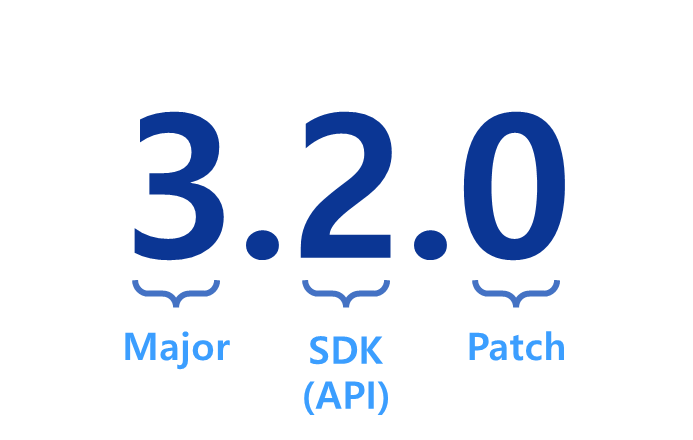
Info. The version name of Dart-Suite consists of the following rules:
Major : A major change that is not compatible with lower (older) versions
(currently Dart-Platform 3)SDK(API) : SDK version (version of Dart-API).
Patch : When fixing bugs while being compatible with same SDK versions.
Note.
If Dart-IDE fails to build an existing project even after changing SDK from 1 to 2, Please follow the guide below.
Step 1. Replace
webpack.config.jsfile toesbuild.config.jsfile in your project.Path:
Project Folder▸com.your_project.name
Step 2. Replace
package.jsonfile to new one.Path:
Project Folder▸com.your_project.name
Step 3. Change the “name” and “version“ in
package.jsonfile.Path:
Project Folder▸com.your_project.name▸package.jsonfrom: default the package name and version.
CODE{ "name": "com.example.mymodule", "version": "0.1.0", "main": "./src/index.tsx", "private": true, "license": "DOOSAN", ...to: change the package name and version to the package name and version of your project.
CODE{ "name": "{your package name}", "version": "{your project version}", "main": "./src/index.tsx", "private": true, "license": "DOOSAN", ...