V3.3.0
Hello. This is Dr.Dart Manager.
Please note that all Dart-Suite products updated to V3.3.0.
Note.
Connection may not be possible during Dart-IDE, Dart-Store, Dart-APIs, and Dart-Developers server maintenance and updates.
New Features
The main features of Dart-Suite V3.3.0 are as follows.
Releasing the Dart-Bridge Solution | The Dart-Bridge solution is a solution that converts and transfers data so that tasks and settings created by users in Dart-Platform V2 can also run in Dart-Platform V3.
Download(Doosan RobotLab login is required) 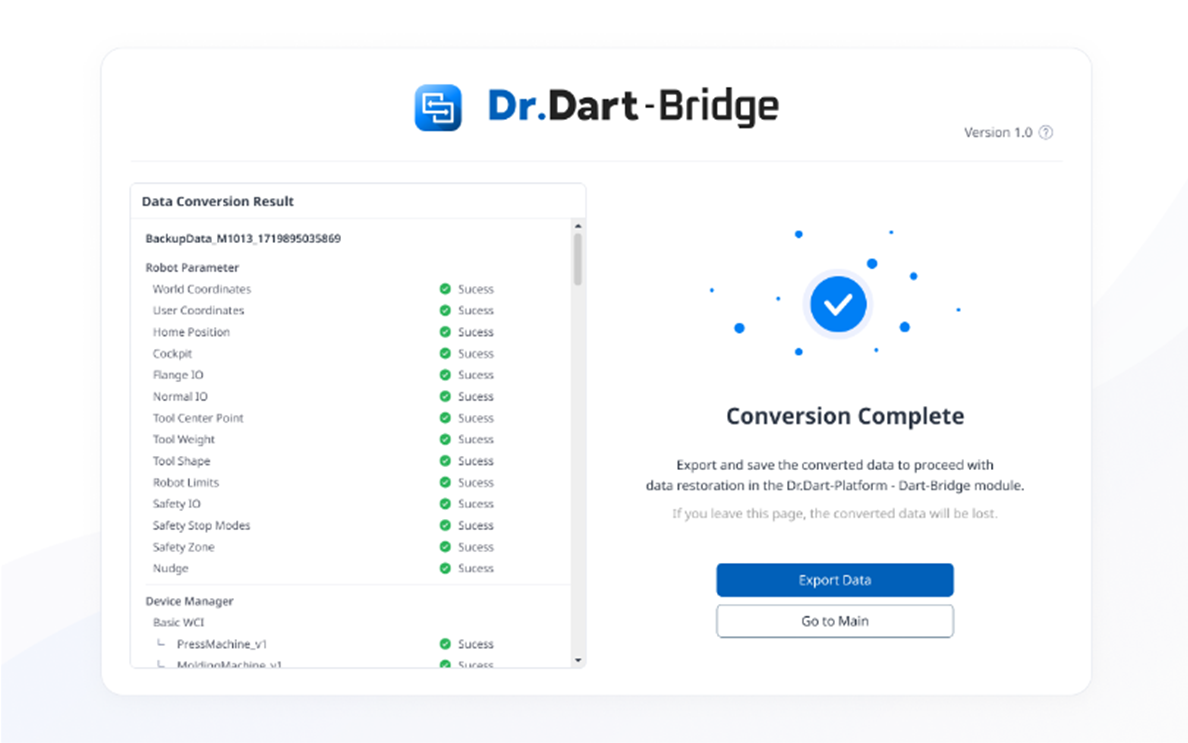 Dart-Bridge Program 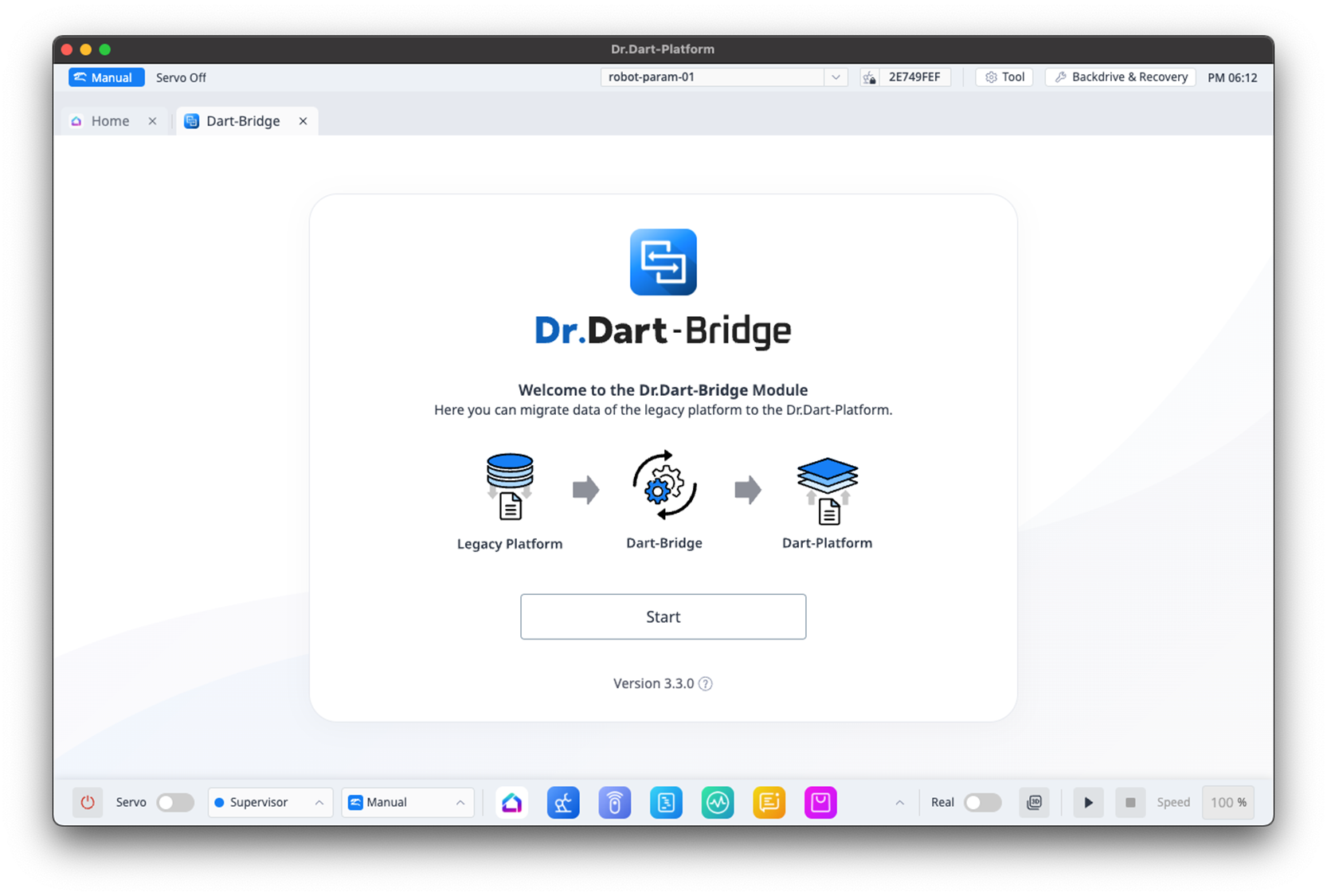 Dart-Bridge Module |
SDK3 Updates | New
Improvement
|
Now you can set the
| |
Improving Authorities Usability | The inconvenience of having to change user authorities and safety modes separately has been improved.
|
Release of VS Code Plugin v1.0.2 |
|
DRL Updates |
Note
|
Bug Fixes | Corrected below errors:
|
Release Notes
Version: Dart-Suite V3.3.0 NEW
Released at:
1. Dart-SDK
Version: SDK3 NEW
Released at:
2. Dart-IDE
2-1. Dart-IDE
Version: V2.2.1
Released at:
Dart-IDE Update Notice
Hello, This is the Dart-IDE service operation team.
The Dart-IDE provided by Doosan Robotics will be terminated on Jun 10, 2025.
Modules and data created in Dart-IDE will no longer be available at the end of the service, so please back them up safely before the end.
After the end of the service, please use the "IDE-Plugin" extension in Visual Studio newly provided by Doosan Robotics.
Guides: Dart-IDE VS Code Extension
Download: Doosan Dart-IDE(VS Code extension)
We apologize for any inconvenience this my cause, as this is to provide better service in the long term. We will return with better service in the future.
Thank you !
2-2. Dart-IDE VS Code extension
Version: V1.1.0 NEW
Released at:
3. Dart-Platform
Version: V3.3.0 NEW
Released at:
Categories | Features | |
|---|---|---|
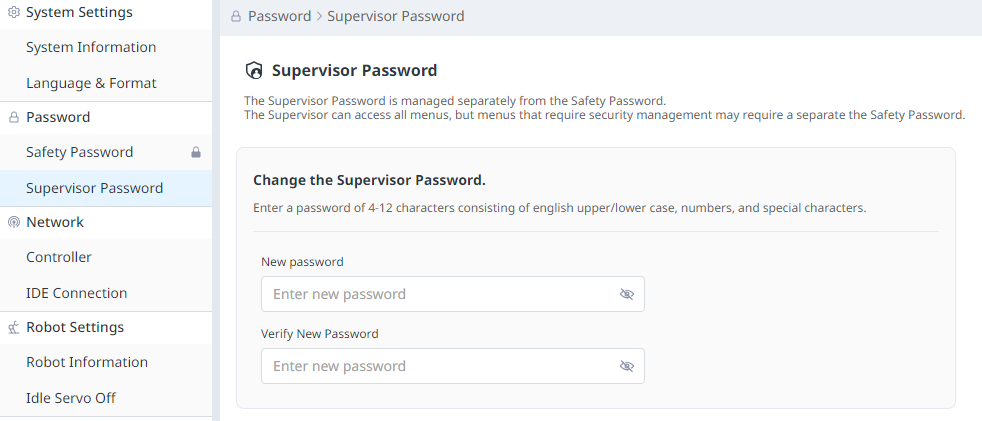
| 1 | Improvement | Administrator Password Addition
 |
| 2 | Homing Pop-up Improvement
| |
| 3 | Mode Switching Enhancement
| |
| 4 | Controller Network Information Update
| |
| 5 | The Jog+ module has been modified to be non-deletable. | |
| 6 | Fixed the issue where the module package or shortcut was deleted after data synchronization is completed. | |
| 7 | Improved frequent connection issues occurring on low-spec PCs through performance optimization. | |
| 8 | [Issue] When connecting A Series and AS(FTS) Series in mix and match scenarios, checksum mismatch occurred due to different cockpit data. | |
| 9 | The simulator environment has been modified to set the flange board version to the new flange.
| |
| 10 | Footer Module Icon Order Change
| |
| 11 | Header/Footer UI Performance Improvement | |
| 12 | Upon the first boot of the robot, the flange voltage is now set to 24V. | |
| 13 | Terminology Adjustment
| |
| 14 | Fixed the issue causing crashes when a forceful control retrieval request was made before a response to a control retrieval request. | |
| 15 | Change | Module Deactivation Dialog Fix
|
| 16 | Tool Weight Decimal Place Correction
| |
| 17 | Fixed the issue where the preload module installation occasionally fails during controller connection or reconnection. | |
| 18 | Fixed the problem where mouse selection was not working on the TP. | |
| 19 | Fixed the bug that the lock icon was displayed on the ‘Apply' button of the Tool item review dialog even when 'Settings > Safety Password > Password Lock' was off. | |
| 20 | Fixed the targetExternalForceMonitoring crash. | |
| 21 | Fixed the issue where the e-stop pop-up does not appear during real on/off. | |
| 22 | Fixed the problem where the rejection message does not appear when control rights requests are denied. | |
| 23 | Fixed the issue where modified user coordinate system information was not updated during program execution. |
4. Dart-Module
Released at:
5. Dart-Store
Version: V2.2.1
Released at:
6. Dart-Services
Version: V2.1.2
Released at:
7. Known Issues
SDK Update guide
Update Guide
In the next version, we plan to change the program to enable installation without deleting, and we plan to allow users to install multiple versions of Dart-Services and Dart-Platform by changing the folder name in the installation path.
1. After deleting existing Dart-Services, download and install new Dart-Services.
2. After deleting existing Dart-Platform, download and install new Dart-Platform.
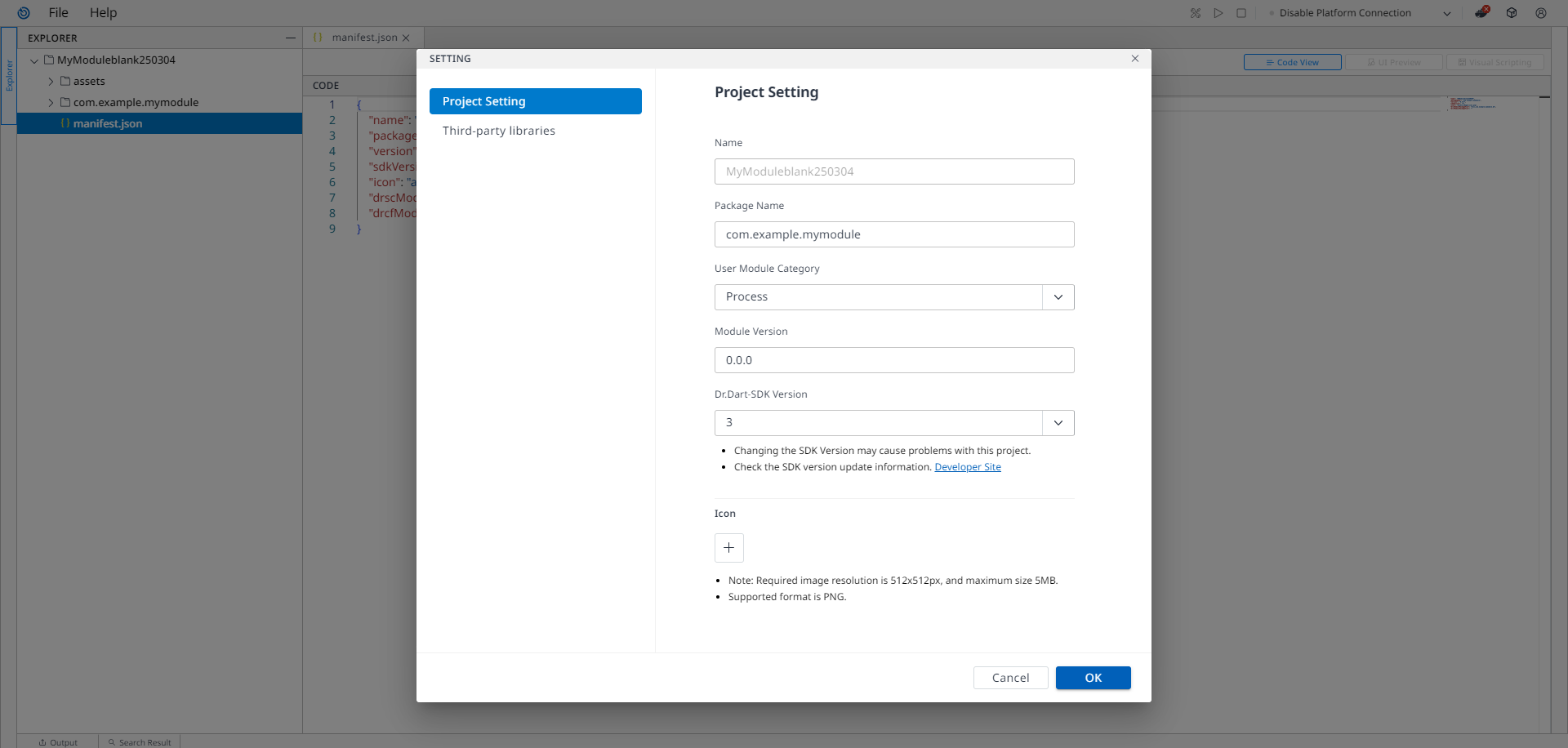
3. Updating your project from SDK2 to SDK3 in Dart-IDE:
Step 1. Access to the Dart-IDE.
Step 2. After opening the project, click
File▸Project Setting.
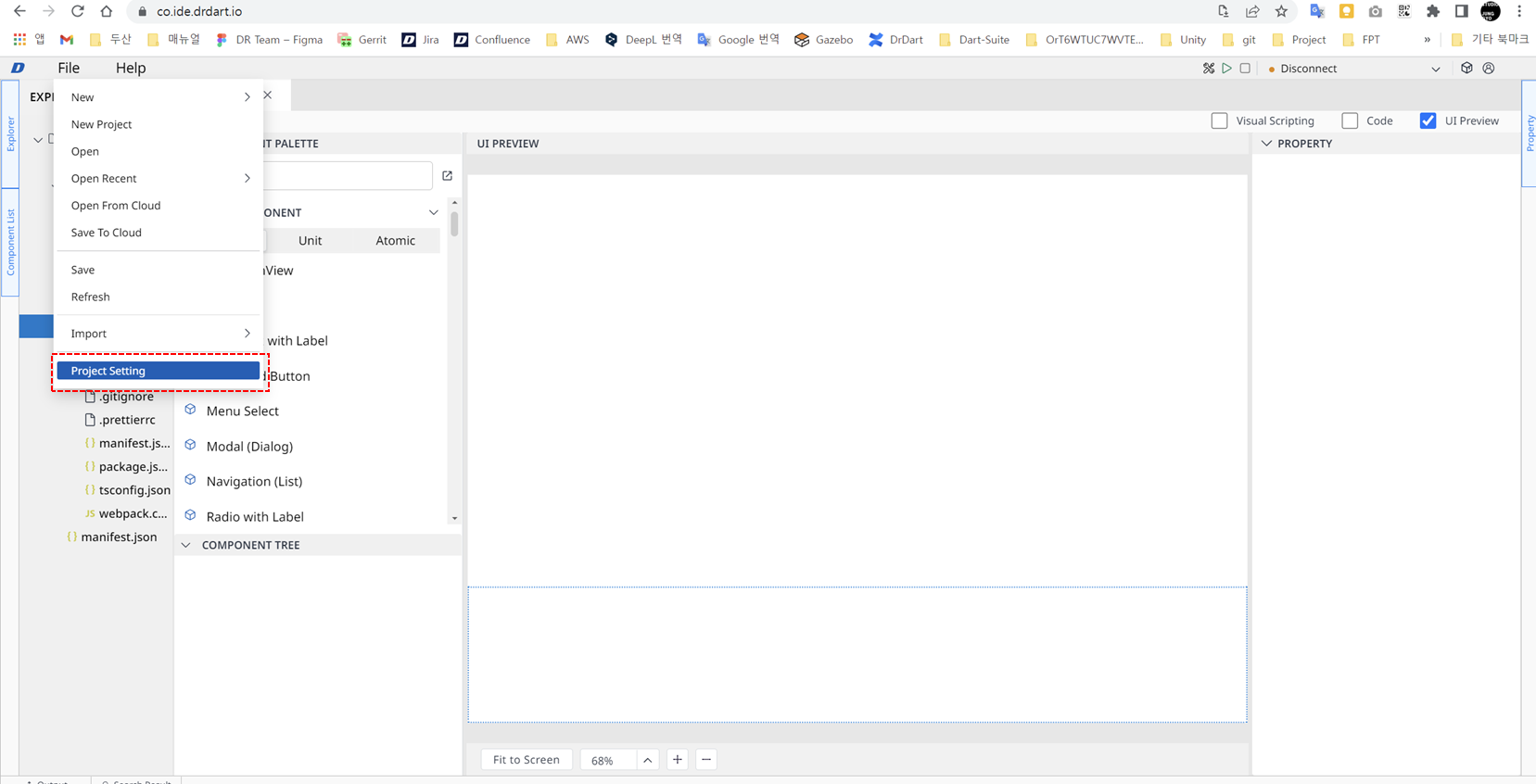
Step 3. Change Dr.Dart-SDK Version from 2 to 3.
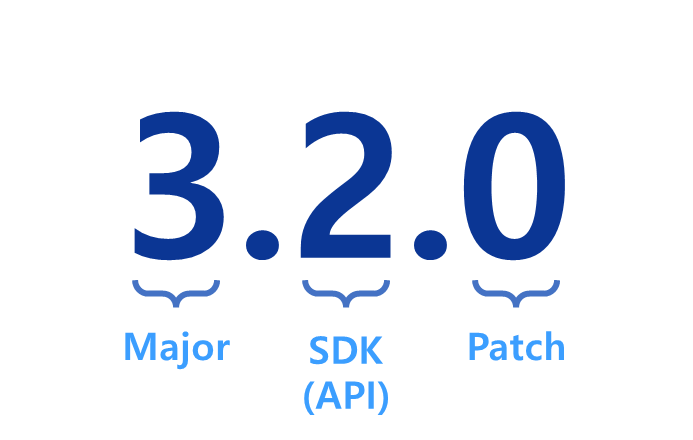
Info. The version name of Dart-Suite consists of the following rules:
Major : A major change that is not compatible with lower (older) versions
(currently Dart-Platform 3)SDK(API) : SDK version (version of Dart-API).
Patch : When fixing bugs while being compatible with same SDK versions.
Manual Update Guide for SDK3
Download Dart-API SDK3 file
Delete all files within the
dart-apifolder located inProject folder > lib. Then, unzip the SDK file from step 1 and move its contents into thedart-apifolder.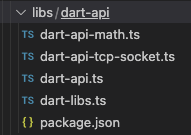
3. Change the sdkVersion field from "2" to "3" in the Manifest.json file located in the Project folder.
{
"name": "moduleName",
"packageName": "com.sample.test",
"version": "0.1.0",
"sdkVersion": "3",
"icon": "assets/images/icon.png",
"drscModulePackageFile": "drsc_com.sample.test.dm",
"drcfModulePackageFile": ""
}Soon, we will provide a feature to update the SDK through the UI within the IDE VS Code extension.
Note.
If Dart-IDE fails to build an existing project even after changing SDK from 1 to 2, Please follow the guide below.
Step 1. Replace
webpack.config.jsfile toesbuild.config.jsfile in your project.Path:
Project Folder▸com.your_project.name
Step 2. Replace
package.jsonfile to new one.Path:
Project Folder▸com.your_project.name
Step 3. Change the “name” and “version“ in
package.jsonfile.Path:
Project Folder▸com.your_project.name▸package.jsonfrom: default the package name and version.
CODE{ "name": "com.example.mymodule", "version": "0.1.0", "main": "./src/index.tsx", "private": true, "license": "DOOSAN", ...to: change the package name and version to the package name and version of your project.
CODE{ "name": "{your package name}", "version": "{your project version}", "main": "./src/index.tsx", "private": true, "license": "DOOSAN", ...